近年来,轮式移动机器人(WMRs)因其结构简单、灵活、易于操作而被广泛应用于越来越多的实际场景,特别是在勘探、运输、搜索等应用场景。轨迹跟踪控制是轮式移动机器人运动控制中的一项核心任务,在工程中有着广泛的应用。然而,在实际任务中,滑动干扰严重影响了轮式移动机器人的轨迹跟踪性能,特别是在湿滑路面和急转弯时。
针对该问题,东南大学自动化学院研究团队在王翔宇教授的带领下,开展了如何在遇到滑动干扰情况下实现精准的轨迹跟踪控制研究,并提出了一种克服轮式移动机器人滑动干扰的虚拟参考轨迹方案(VRTS)。运用该方案可使移动机器人完成高精度的轨迹跟踪任务。目前该论文已在国际SCI期刊 Transactions of the Institute of Measurement and Control 上发表。
一、研究方案:
研究团队提出了一种基于干扰补偿的虚拟参考轨迹方案。与传统的在控制器上进行干扰补偿的设计理念不同,该方案将滑动干扰的估计集成到参考轨迹中。方案由两部分组成:首先,将滑动干扰估计值与参考轨迹融合,生成虚拟参考轨迹。其次,设计控制器使轮式移动机器人的里程计位置和偏航角跟踪虚拟参考轨迹,然后轮式移动机器人的实际位置即可跟踪上真实参考轨迹的位置。通过对比仿真和实验验证了所提方案的有效性和优点。
方案优势:
1、滑动干扰得到了有效的补偿。一般来说,补偿控制器中WMR的横向滑动干扰具有挑战性。在本文提出的方案中,通过将滑动干扰的估计整合到参考轨迹中,有效地补偿了纵向和横向滑动干扰。
2、提出了一种简洁的干扰逼近方法来估计滑动干扰。对WMR的里程计位置与WMR实际位置的误差进行求导以得到滑动干扰的估计。所提出的干扰逼近方法设计原理简单,调整参数少,更易于在工程中实现。
3、所提出的VRTS具有良好的兼容性。该方案通过修改参考轨迹而不是控制器,来补偿滑动干扰。即使不带有滑动干扰补偿的现有控制器,也可以直接在所提出的方案中使用。此外,在没有滑动干扰的情况下,原始控制器的标称性能得以保留。
二、实验验证:
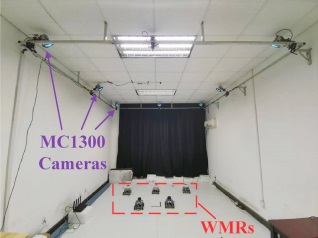
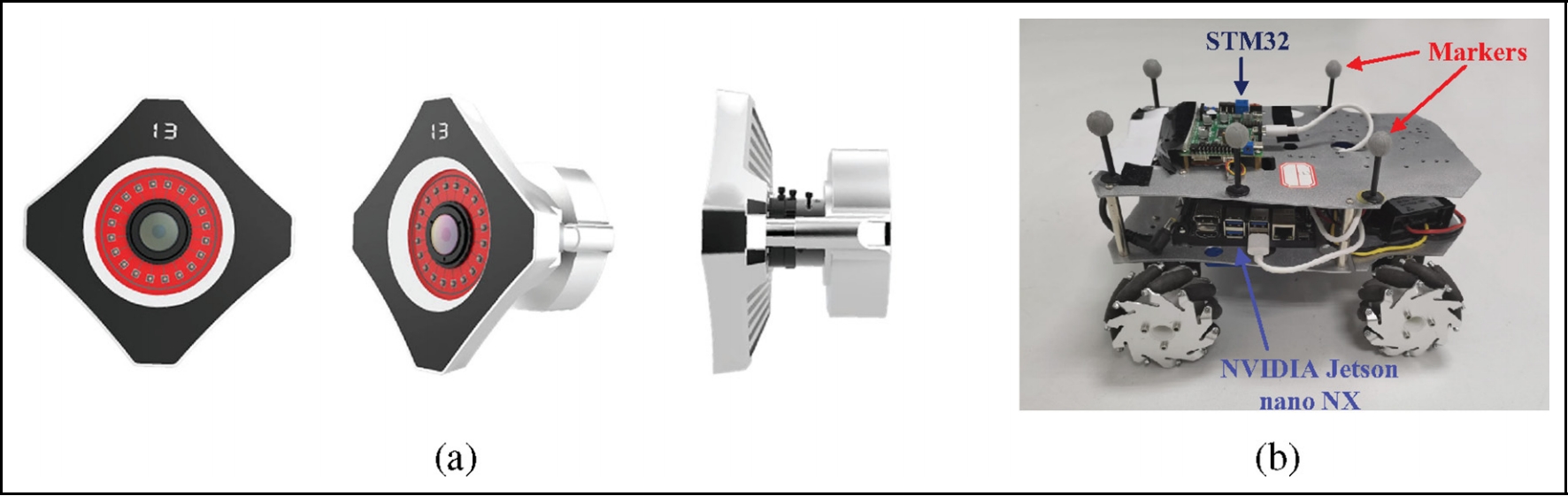
实验平台主要由青瞳视觉动捕系统和WMR两部分组成,并配备了一个Intel i7-12700H处理器。动捕系统通过识别WMR上的标记来测量WMR的APYA,并以100 Hz的频率发送给WMR。
通过光学动捕系统高精度、低延时、无死角等优势,实时定位采集WMR的位置、运动轨迹等信息,为虚拟参考轨迹方案的验证,提供精确的数据参考。
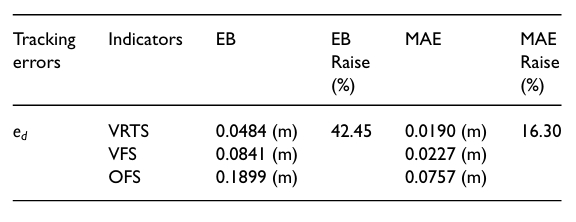
为了定量评估VRTS在抗滑动干扰方面的性能,实验进行了距离跟踪误差的误差边界(EB)和平均绝对误差(MAE)分析。通过VRTS与纯视觉方案(VFS)的比较表明,VRTS在性能上相较于VFS有显著的提升。
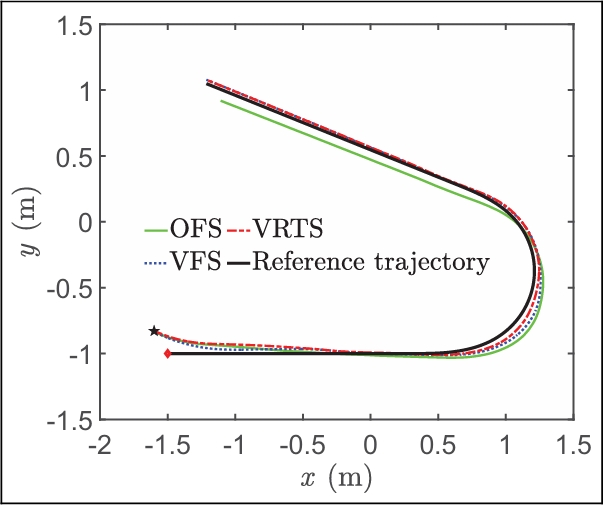
为了进一步验证提出的虚拟参考轨迹方案(VRTS),实验将虚拟参考轨迹方案(VRTS)与纯视觉方案(VFS)以及里程计反馈方案(OFS,即直接使用轮式移动机器人的位姿作为反馈信号来跟踪参考轨迹)进行了对比。实验给出了具体的性能指标(即误差边界EB和平均绝对误差MAE),并展示了VRTS相较于VFS在性能上的提升。
VRTS、VFS和OFS之间的轨迹跟踪性能比较,以及VRTS相对于VFS的性能提升
三、实验结果:
通过对比仿真和实验,验证了该虚拟参考轨迹方案的有效性及优越性。与传统方法相比,该方案不仅能够有效处理滑动干扰,还能在精确估计纵向和横向滑动时,使距离跟踪误差收敛于零。这一成果标志着WMR在轨迹跟踪控制领域取得了又一项技术进步。
参考轨迹和WMR的轨迹
距离跟踪误差ed的响应曲线,以及控制输入v和w的时间历程:(a) ed,(b) v,和 (c)w
参考文献:
Terblanche J, Claassens S and Fourie D (2021) Multimodal navigation-affordance matching for SLAM. IEEE Robotics and Automation Letters 6(4): 7728-7735.
Saptharishi M, Oliver C, Diehl C, et al. (2002) Distributed surveillance and reconnaissance using multiple autonomous ATVs: cyberscout. IEEE Transactions on Robotics and Automation 18(5): 826–836.
Qin T, Li P and Shen S (2018) VINS-Mono: A Robust and versatile monocular visual-inertial state estimator. IEEE Transactions on Robotics 34(4): 1004–1020.
原文链接:
https://journals.sagepub.com/doi/abs/10.1177/01423312241239145