外骨骼机器人,因其精准的控制系统、舒适的穿戴体验及显著的康复效果,成为辅助康复治疗的得力助手,受到医学界和学术界的广泛关注和研究。
作为外骨骼机器人的关键技术——运动模式识别,在康复训练中扮演着重要角色,有利于辅助不完全截瘫患者或老年人的活动,并进行人机交互。但是,也存在对人体运动模式记录评估不精确等问题,导致对用户自主运动能力的限制。为了提升运动模式识别的精度,昆明理工大学复杂机电系统智能控制研究所开展了基于融合随机森林算法的人体运动模式识别研究,并在国际优秀学术期刊Measurement上发表。
一、研究方案
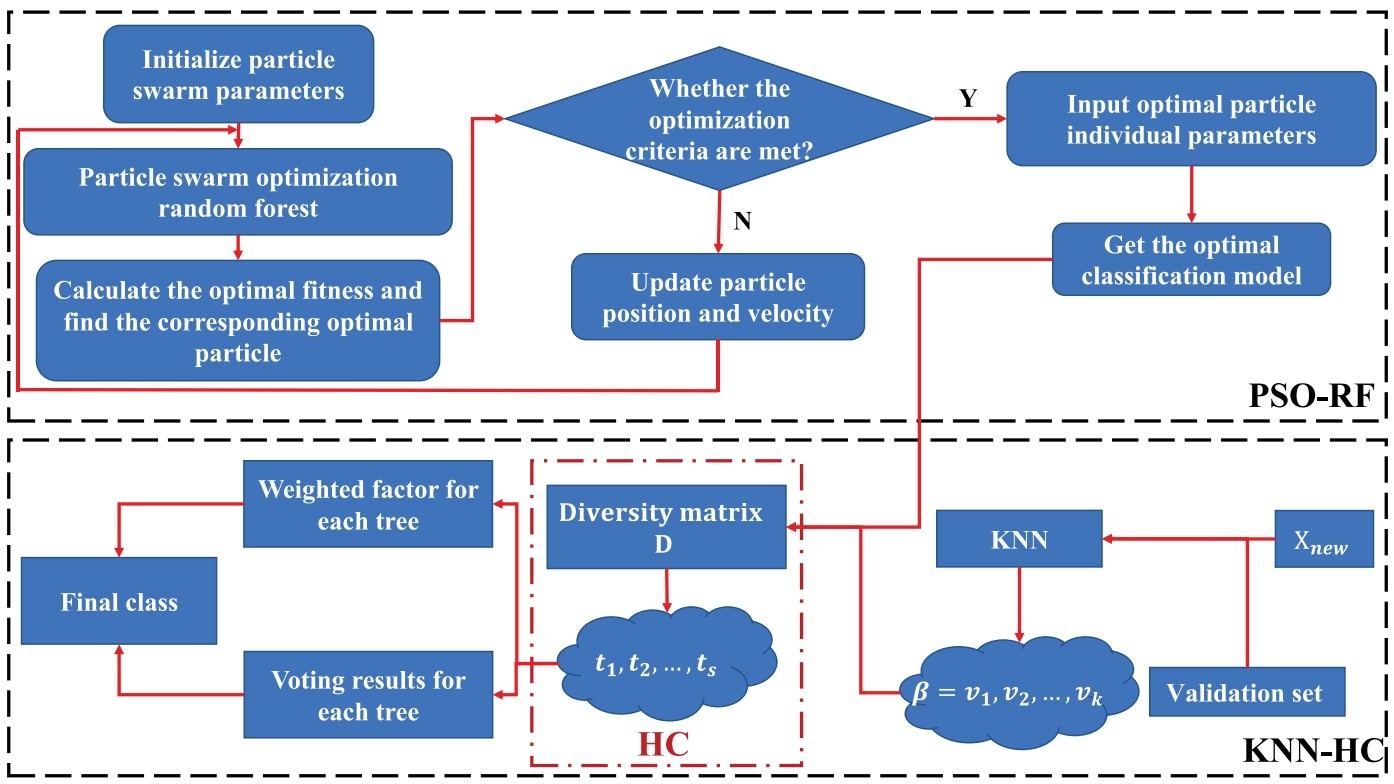
研究团队提出了一种融合随机森林算法(PSO-RF)-(KNN-HC),用于识别平地行走、坐着、站立、上楼梯、下楼梯、上坡和下坡等7种人体运动模式。采用粒子群优化(PSO)方法寻找随机森林模型的最优参数,构建最优分类模型。在随机森林的决策过程中,应用k-最近邻-分层聚类(k-recent neighbors-hierarchical clustering,KNN-HC)算法为新的识别样本选择决策树,并计算每棵树的投票权重。在数据处理阶段,使用快速傅里叶变换(FFT)从频域视图分析运动数据,以周期划分数据段并进行特征提取。最后,通过真实运动数据采集平台,对基于自建人体运动数据集的其他机器学习算法进行了验证,并在开源数据集上验证了所提方法的有效性。
方案亮点:
在人体运动模式识别的过程中,通过只利用髋关节和膝关节的角度信息来实现运动模式识别,从而减少了数据处理的工作量。
提高RF对相似样本的识别能力。将粒子群优化(Particle Swarm Optimization, PSO)算法融入RF的建立过程中,实现传统RF参数的优化。此外,采用K近邻层次聚类(K-Nearest Neighbor Hierarchical Clustering, KNN-HC)算法改进RF的决策过程,使RF能够针对新的一组样本重新筛选决策树,并形成一个新的RF用于识别。
为了确保提取的特征能够更好地代表不同受试者之间的每一种运动模式,研究团队在数据处理阶段对步态数据进行频域分析,采用快速傅里叶变换(Fast Fourier Transform, FFT)方法,并根据周期对数据进行分段处理。
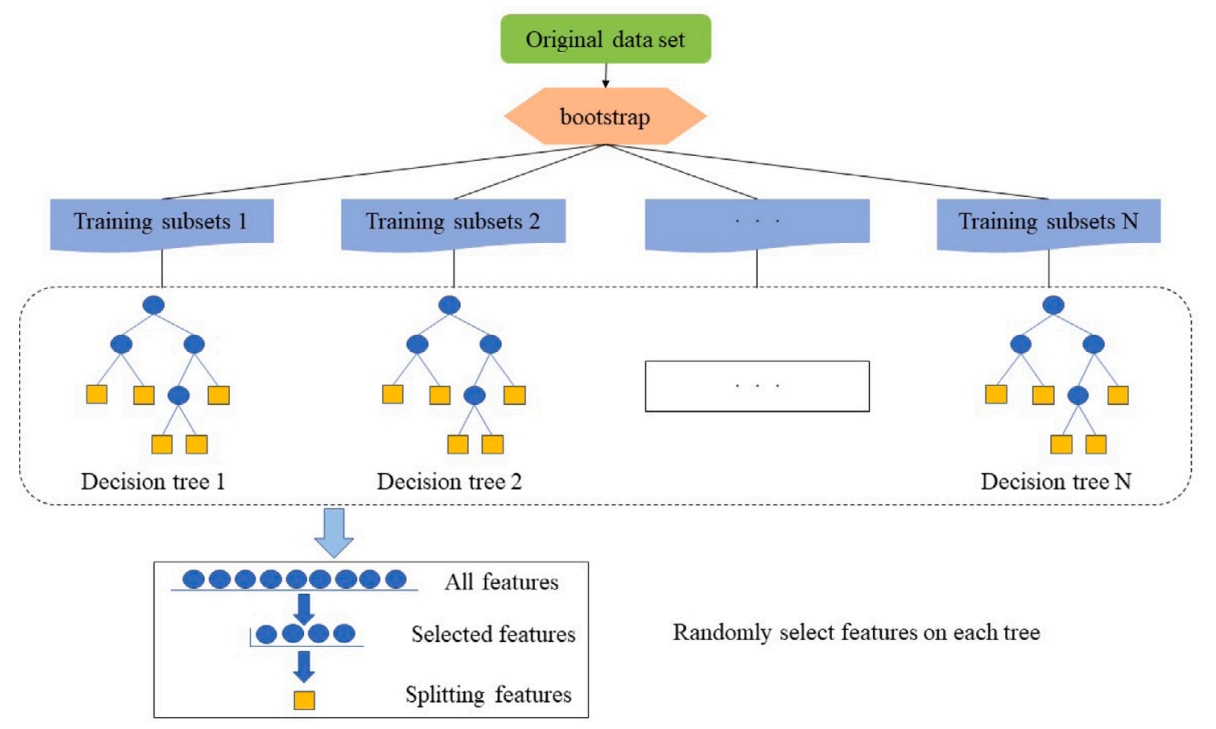
随机森林流程图
(PSO-RF)-(KNN-HC)模型构建的流程图
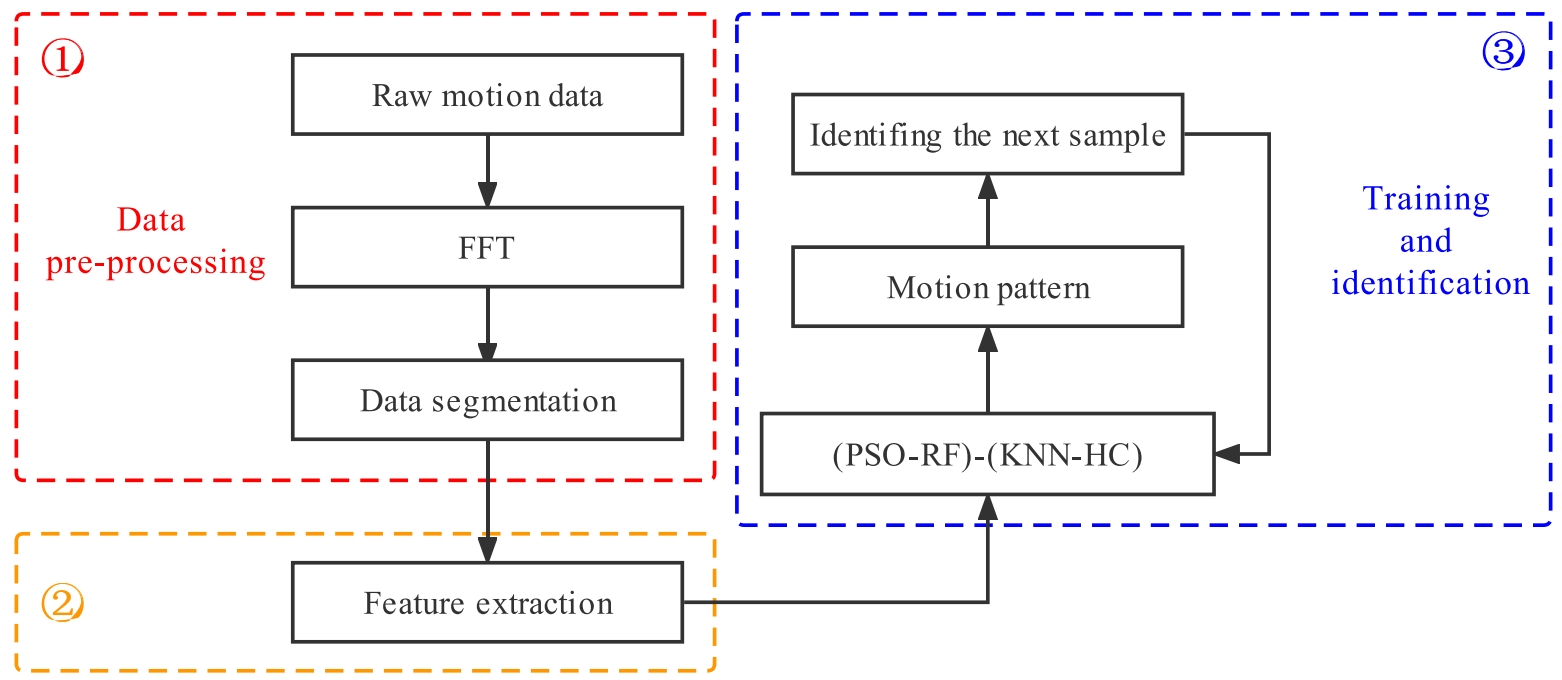
运动模式识别方法的流程图
二、实验验证:
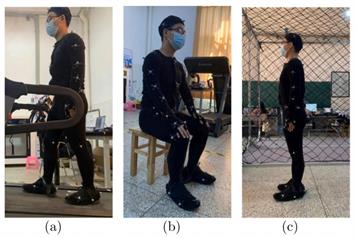
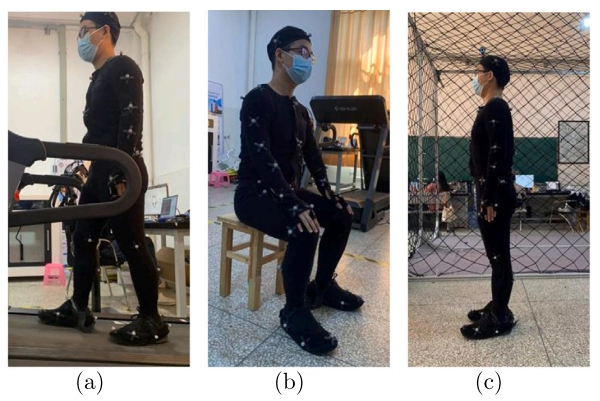
为了验证该方法在运动模式识别中的有效性,保障运动数据采集平台数据集的多样性及可变性,并降低训练模型过拟合的可能性,研究团队对11名体重55~85kg,身高160~185cm,年龄 22~25岁的健康受试者,在不同环境下的不同运动状态进行数据搜集。研究团队采用了青瞳视觉光学动捕系统,采集人体平走(FW)、坐( SI)、站立(ST)、上楼梯(US)、下楼梯(DS)、上斜坡(UR)和下斜坡 (DR)7种运动模式的信息,借助高精度运动捕捉等优势,为实验提供真实、完整、可靠的数据参考。
(a)旗帜行走(b)坐着(c)站
(d)走上楼梯(e)走下楼梯(f)爬上斜坡(g)走下斜坡
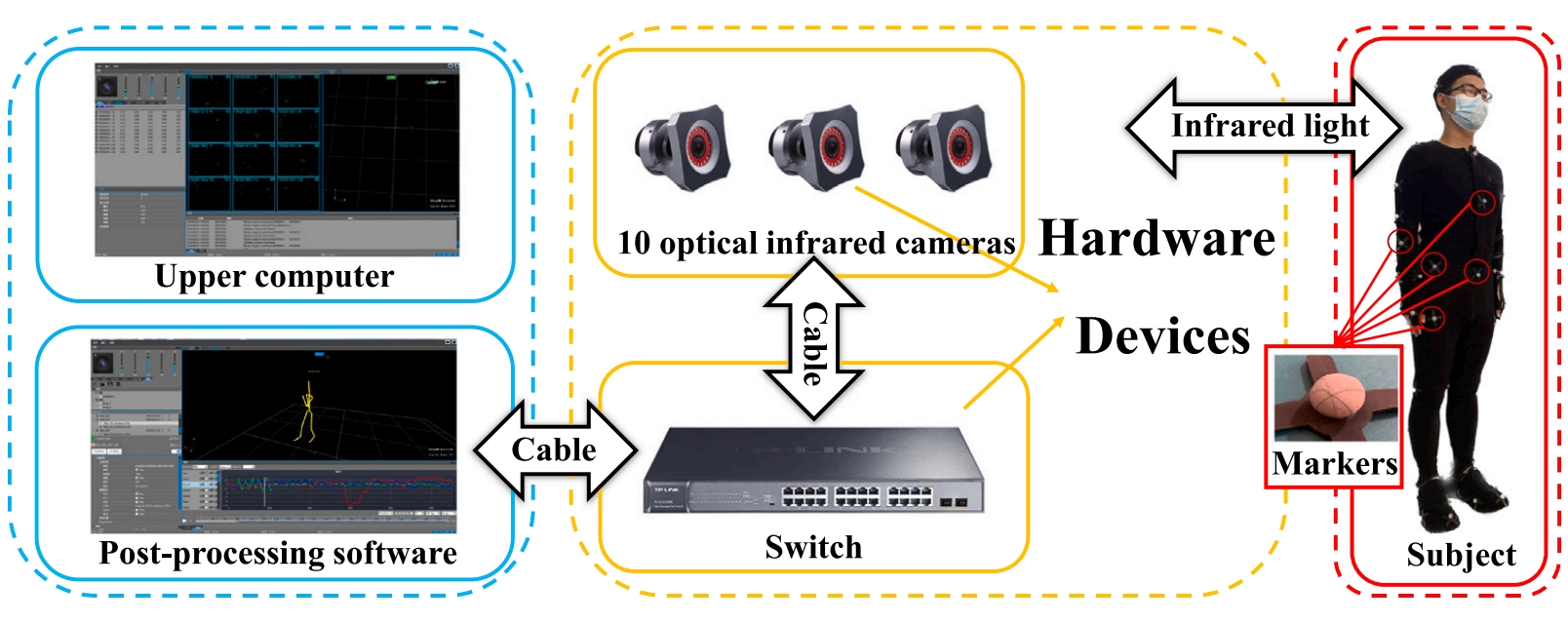
基于运动采集系统的数据流信息
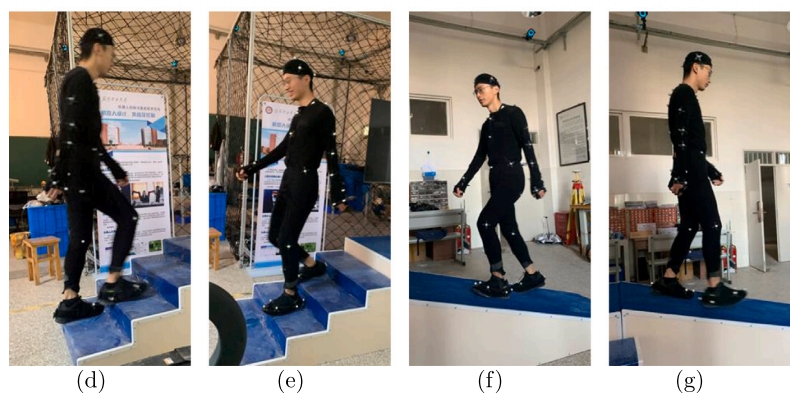
此外,该研究将髋关节和膝关节的角度作为步态模式识别的关键运动信息,并绘制曲线图以便清晰准确呈现数据变化。
通过曲线表可以看出,在步行运动中,人体下肢的髋关节和膝关节角度呈现周期性变化。不同运动模式下,髋关节和膝关节角度曲线的斜率变化有所不同。平地行走(FW)、下楼梯(DS)和下斜坡(DR)的髋关节曲线较为平缓,而上楼梯(US)和上斜坡(UR)的髋关节曲线则较为陡峭。除了上斜坡(UR)外,膝关节的变化幅度通常大于髋关节。此外,这两对运动模式中髋关节和膝关节角度变化范围相似,表明这两对运动模式具有一定的相似性。
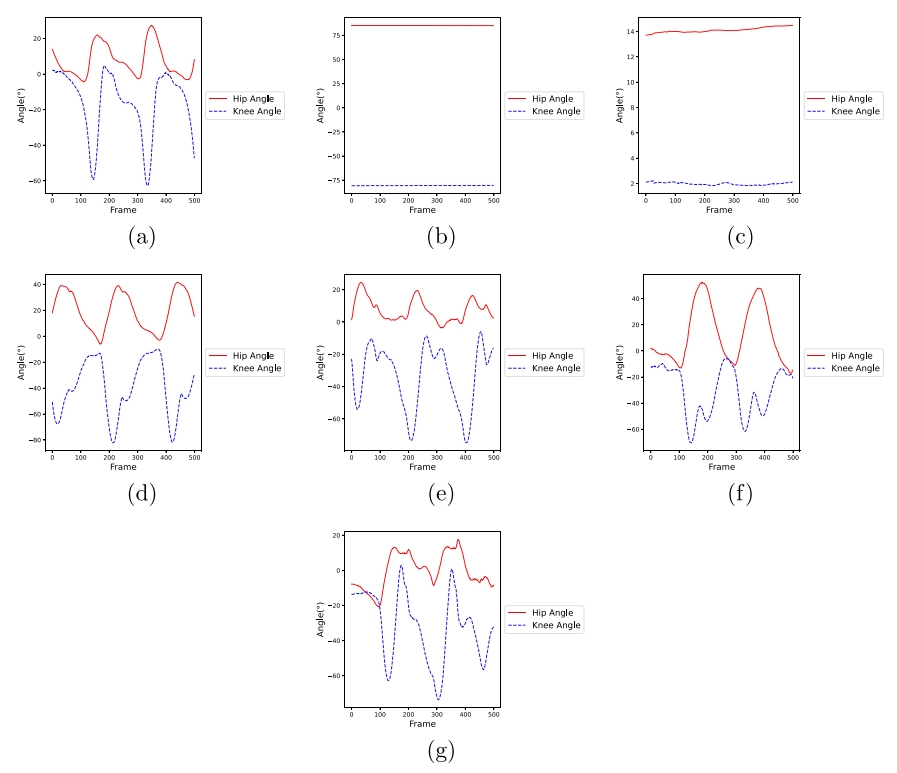
运动特征数据集组成
为了确保数据集的平衡性,实验中每种运动模式都包含了等量的数据。训练集、测试集和验证集的数据量比例为7:2:1。对于这三个数据集,训练集用于构建原始的随机森林(RF)模型,验证集用于动态选择和优化所选树的性能评估,而测试集则用于评估所提出的分类方法的有效性。
研究团队还使用“精度、查全率、F1评分、准确性"4个标准,评估训练模型的测试能力。通过这四个指标的综合评估,可以更全面地了解所提出方法的性能,并对其进行优化和改进。计算方式如下:
三、实验成果:
在随机森林RF模型中,最优参数n_estimators(决策树数量)和max_depth(树的最大深度)分别为100和30。如下图所示:
适应度函数与迭代次数之间的关系
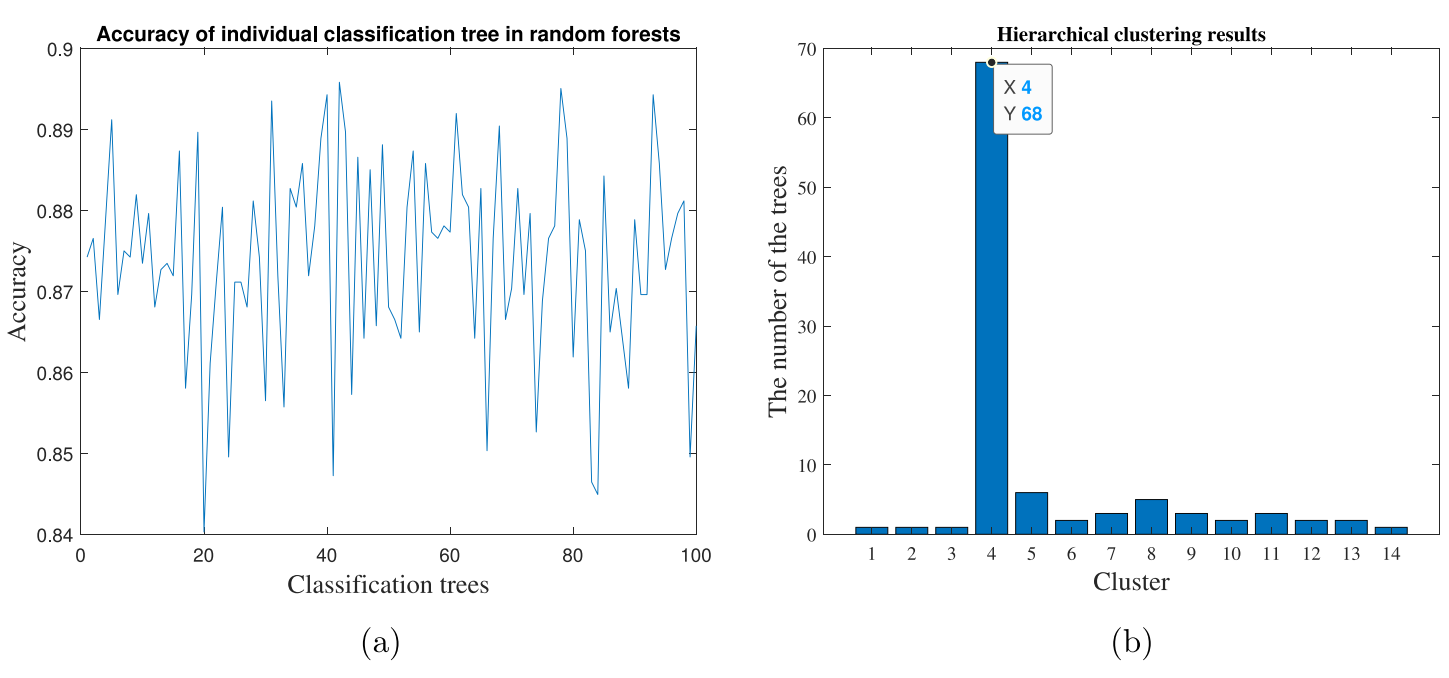
(a) 对100棵决策树的准确性(b)决策树的聚类结果
研究团队通过测试集验证100棵决策树的性能,并计算每棵决策树的准确率,得出结论,大多数决策树的准确率集中在84%到90%之间,为了进一步验证所提出的运动模式识别方法的有效性,研究团队选择了具有优化参数的神经网络算法和三种机器学习算法与所提出的方法进行比较。识别模型比较实验中的参数设置如下表所示:
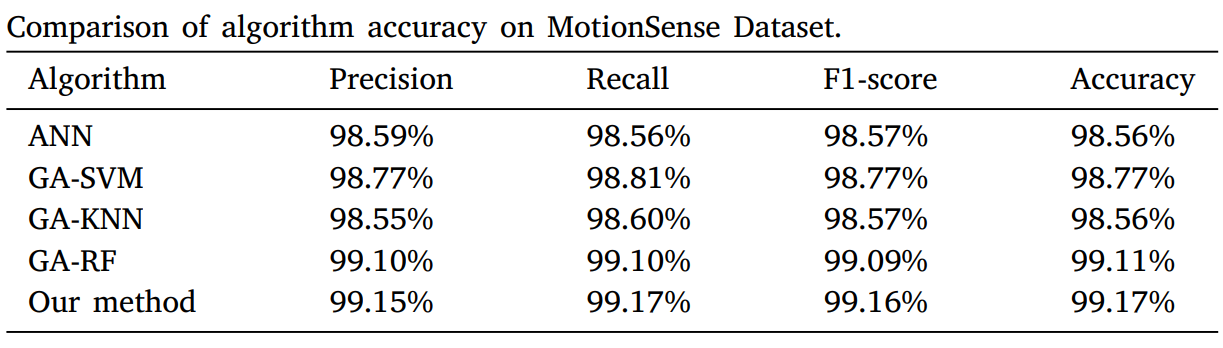
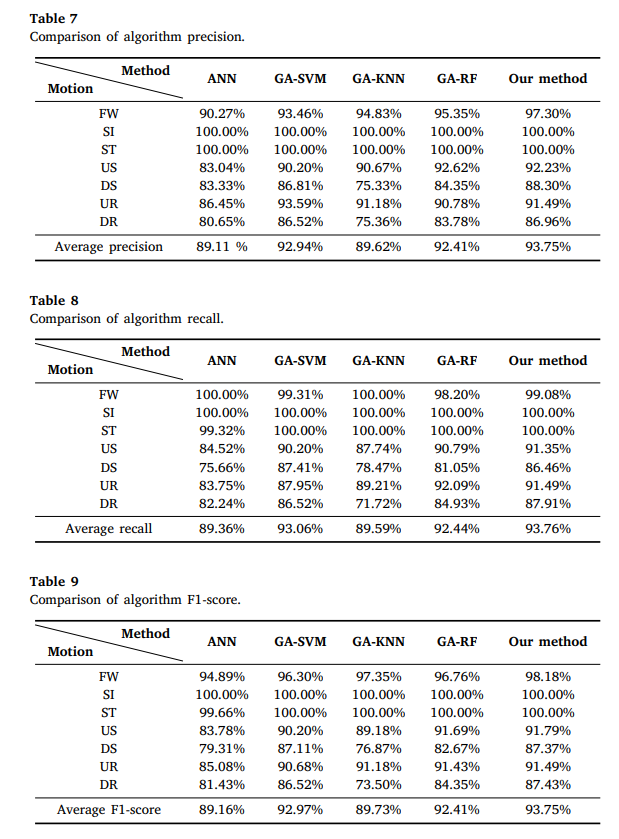
通过比较五种算法,可以看出在面对复杂的分类问题时,动态可选择的RF算法相比其他优化的机器学习算法展现出更优越的分类性能。如下表所示:
为了进一步验证所提出算法的通用性,在MotionSense数据集上进行了比较。算法比较采用了之前提到的相同数据划分方法。从比较结果可以看出,所提出的算法仍能在不同的数据集上完成运动识别任务,证明了算法的通用性。
结论:
1、利用基于光学运动捕捉系统的真实运动数据采集平台,获取髋关节和膝关节的角度信息作为运动模式识别的依据,实现了优异的分类性能。
2、使用收集的真实运动数据集和公共数据集验证了改进后的RF融合算法在运动模式识别中的有效性。实验结果表明,在运动模式识别中,(PSO-RF)-(KNN-HC)算法的平均识别精度为93.75%,平均识别召回率为93.76%,平均F1分数为93.75%。在运动识别的整体准确率上,(PSO-RF)-(KNN-HC)算法达到了94.03%,超过了其他机器学习算法,如ANN、GA-SVM、GA-KNN和GA-RF。
实验结果表明,所提出的运动模式识别方法在处理复杂分类问题方面具有巨大潜力。其通过筛选决策树来重新组合随机森林的能力,在处理复杂的多分类问题时非常高效。然而,改进的随机森林融合算法在计算复杂度和时间消耗方面仍面临挑战。此外,该方法的性能还依赖于验证集的质量。因此,未来的改进应集中在随机森林的决策过程上。
参考文献:
[1] Q. Miao, M. Zhang, A. McDaid, Y. Peng, S.Q. Xie, A robot-assisted bilateral upper limb training strategy with subject-specific workspace: A pilot study, Robot.Auton. Syst. 124 (2020) 103334.
[2] S. Hussain, P.K. Jamwal, P.V. Vliet, N.A. Brown, Robot assisted ankle neurorehabilitation: state of the art and future challenges, Expert Rev Neurother. 21(1) (2021) 111–121.
[3] G.L. Kirkwood, C.D. Otmar, M. Hansia, Who’s leading this dance?: Theorizing automatic and strategic synchrony in human-exoskeleton interactions, Front.Psychol. 12 (2021) 624108.
[4] J. Song, A. Zhu, Y. Tu, Y. Wang, M.A. Arif, H. Shen, Z. Shen, X. Zhang, G. Cao,Human body mixed motion pattern recognition method based on multi-source feature parameter fusion, Sensors 20 (2) (2020) 537.
[5] W. Motao, L. Zhijun, L. Qing, W. Meng, Z. Rui, Research on gait recognition and prediction of exoskeleton robot based on improved DTW algorithm, in: Journal of Physics: Conference Series, Vol. 1518, No. 1, IOP Publishing, 2020, 012019.
[6] X. Zhao, J. Zhou, Fast recognition algorithm for human motion posture using multimodal bioinformation fusion, Math. Probl. Eng. 2022 (2022) 9538295.
原文链接:
https://www.sciencedirect.com/science/article/abs/pii/S0263224123011041