11月17-18日,2025中关村具身智能机器人应用大赛决赛在北京中关村国家自主创新示范区成果举行。作为大赛技术支持单位,CHINGMU青瞳视觉亮相赛事现场,并带来基于高性能光学动作捕捉的机器人全流程开发解决方案。

以动捕技术赋能赛事全周期支持
本次大赛聚焦具身智能领域的实际应用,围绕人形机器人、机器狗、机械臂、灵巧手等前沿方向,设置模型能力挑战赛、场景应用赛、学术前沿与产业生态三大赛道,涵盖19项核心任务,涉及家庭服务、商用服务、工业制造、居家服务及安全处置等多个典型场景,旨在推动具身智能技术的研发落地与产业融合。
青瞳视觉作为全球动作捕捉领导者,依托在具身智能领域的深厚积累,具备为类似赛事提供全面技术支持和解决方案的能力,助力参赛团队、裁判系统、行业专家等相关方实现“训练-评测-优化”的闭环技术路径,为赛事与产业应用提供可靠支撑。
赛前:数据驱动下的机器人训练与算法调优
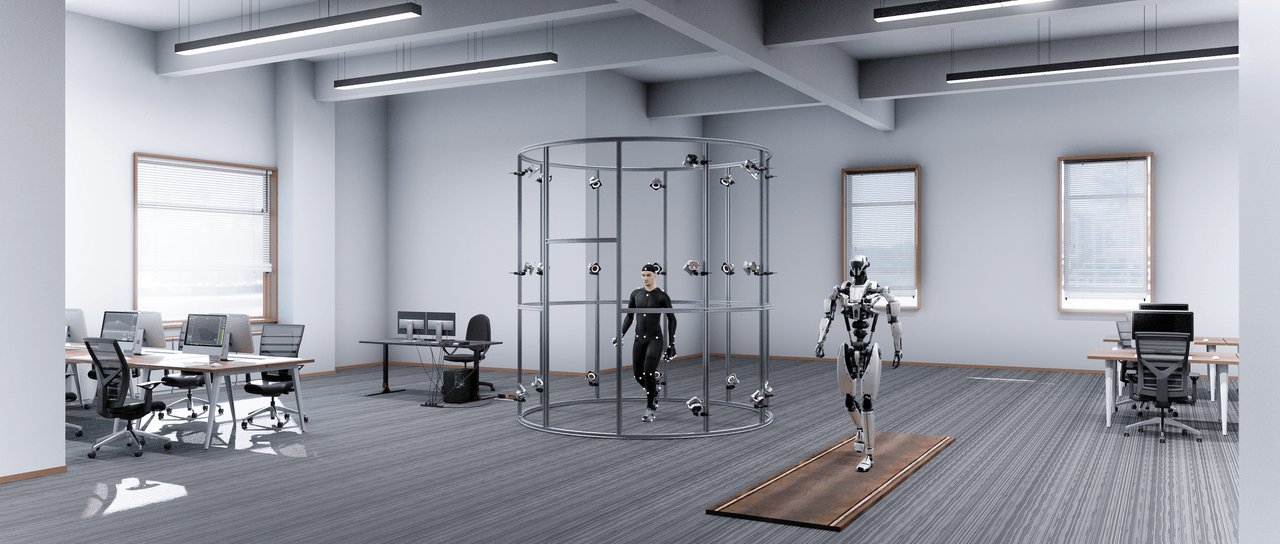
在机器人研发阶段,高质量、高精度的训练数据的获取是算法训练与模型优化的关键。青瞳视觉基于自主研发的光学动作捕捉系统,构建覆盖场地设计、设备部署、数据采集与清洗全流程的数据工厂解决方案,助力高效构建高质量数据集,为机器人运动学习提供全域轨迹信息。
系统以亚毫米级精度实时捕捉机器人全身或部分躯干的运动轨迹,支持多模态数据融合,结合开放协议与多平台SDK,实现运动数据与仿真平台的无缝对接,可广泛应用于:
灵巧手精细操作学习;
人形机器人步态与动态平衡训练;
仿生运动建模与关节控制优化;
该体系有效解决机器人训练中数据真实性不足、标注效率低、多源信息融合难等痛点,为算法迭代与模型优化提供高可靠性数据基础。

赛中:高精度实时捕捉,赋能机器人性能客观评测
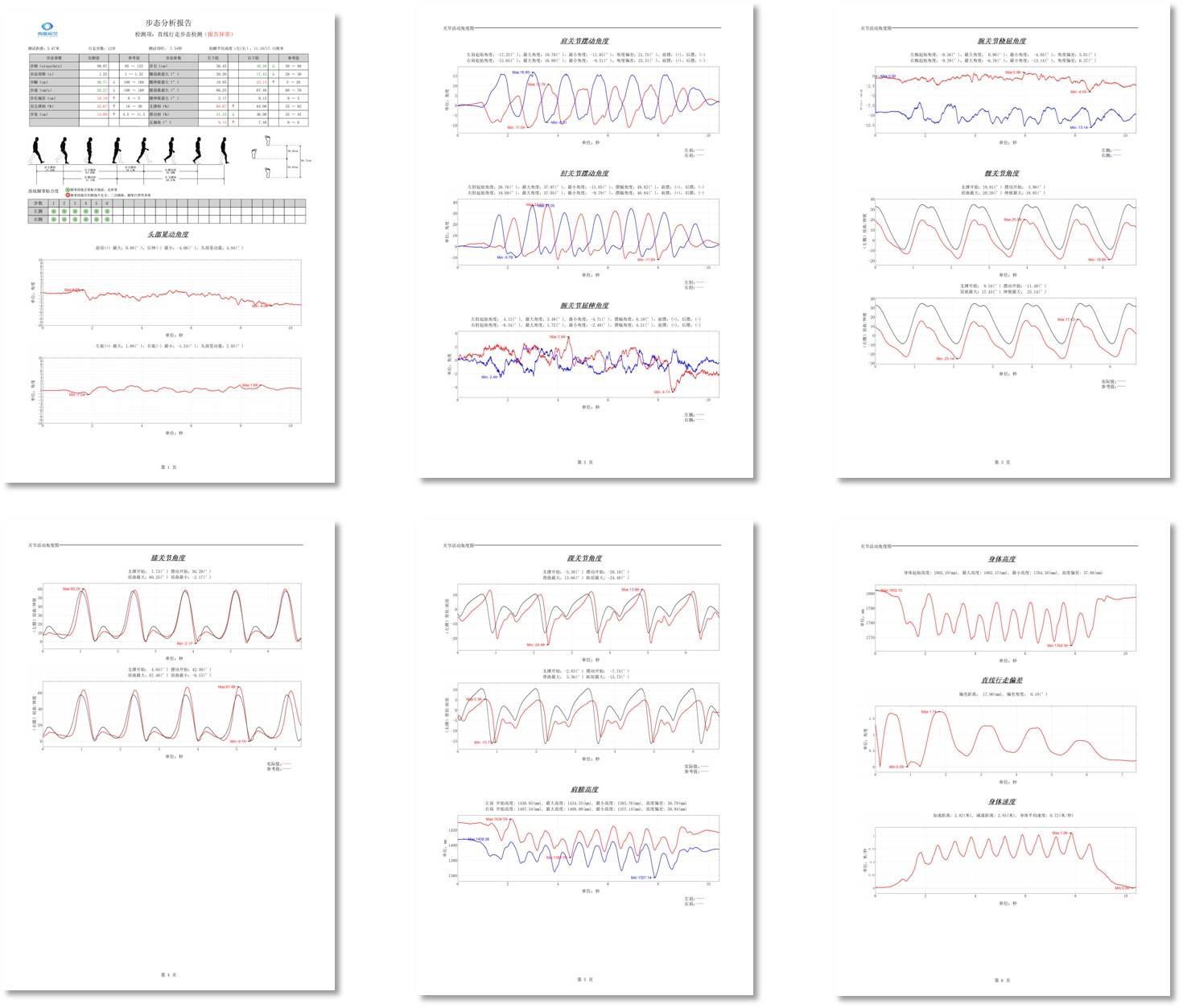
在比赛评测环节,青瞳视觉光学动作捕捉系统可为赛事提供专业级性能评测支持,通过高精度定位与毫秒级实时反馈,构建完整的量化评估体系,为裁判决策提供客观、准确的数据支撑。
系统支持多目标同步追踪与多模态数据采集,结合自定义评测指标与自动化报告功能,精准捕捉机器人在动态任务中的姿态稳定性、轨迹精度与协同表现,适用于以下典型场景的性能评测:
- 人形机器人:步态稳定、越障能力、抓取精度
机器狗:地形适应性、负载稳定性、抗干扰能力
灵巧手:抓取成功率、力度控制、多指协同
机械臂:轨迹精度、重复定位、末端抖动
多机协同:编队保持、任务分配、避障协同
该体系有效解决比赛中主观评分难以量化、动态动作难以追溯、多机协同难以同步评估等技术难点,为赛事提供科学、公正的机器人性能评判依据。
赛后:数据深度回溯,驱动机器人系统持续优化
赛事结束后,青瞳视觉动捕系统可继续为参赛团队及主办方提供数据价值延伸,支持团队开展深度数据分析与算法迭代,推动机器人性能的闭环提升与技术积累:
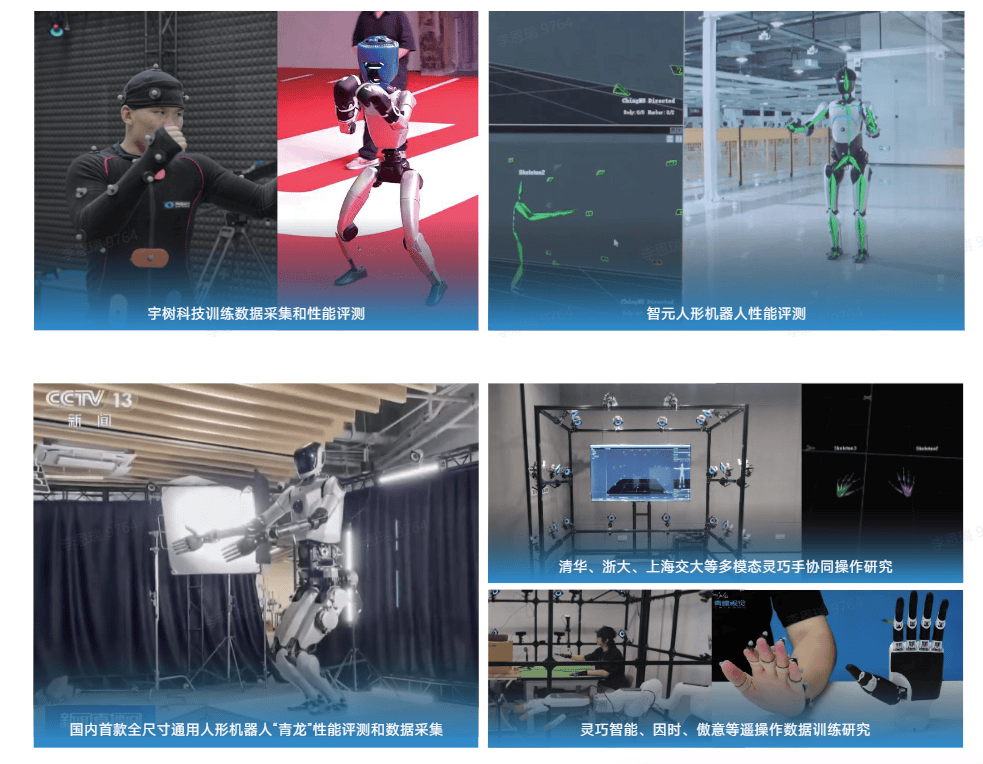
目前,青瞳视觉已与荣耀、宇树科技、智元机器人、人形机器人(上海)有限公司、浙江人形机器人创新中心等企业,以及清华大学、浙江大学、苏州大学等多所高校建立深度合作,共同开展高精度手指动作训练、灵巧手控制、遥操作交互等前沿研究,持续拓展光学动捕技术在具身智能领域的应用边界。
伴随人形机器人产业的快速发展,青瞳视觉将持续推动动作捕捉系统的技术演进与场景落地,致力于在工业自动化、家庭服务、医疗康复、应急救援等多个领域构建高精度运动感知与评测能力,为各类具身智能赛事与研发项目提供可靠的技术支撑与数据保障。