近年来,人形机器人产业备受关注和瞩目。像宇树机器人、智元机器人、优必选等优秀的机器人公司成为荧屏主角。而且随着技术的发展,资金的注入,人形机器人产业将进一步的升级发展。
Optimus人形机器人
据中国信息通信研究院泰尔系统实验室发布的《人形机器人产业发展研究报告(2024年)》显示。预计到2045年后,当人形机器人达到全面智能实现阶段(Lv5)时,全球市场规模有望突破10万亿元人民币,届时将有超过1亿台的人形机器人服务于各行各业。
在人形机器人发展的过程中,动捕技术的助力为机器的发展带来了更多可能。通过动作捕捉技术,可以对人形机器人的运动状态、手部动作、行走、弯腰、跳跃等数据进行采集,并形成有效参考数据,可以大幅提升人形机器人研究的效率。
在人形机器人研究上,特斯拉公开招聘动捕师来训练人形机器人Optimus,并要求应聘人员身高在5英尺7 英寸到 5 英尺 11 英寸之间,能够长时间舒适地佩戴动作捕捉服和 VR 耳机。基于真人数据的训练,让人形机器人的运动更像人。在早期特斯拉公布的Optimus视频,Optimus不仅能够浇花、做瑜伽,二代人形机器人还能开展工厂工作。
动捕技术在人形机器人研究的应用场景
1、灵巧手
手部作为人形机器人不可或缺的一部分,如何让机器人“心灵手巧”,成为各大品牌及研究者追寻的目标。在以往的测试场景中,我们可以看到开瓶盖、分拣水果、切菜、熨烫衣物、进行简单组装工作的人形机器人。这些看似容易的操作,其实,对手部的灵巧性有着极其严格的要求。像人一样拥有丰富复杂的手部表达,和高效的人物执行。除了进行多次的实验训练,借助动作捕捉技术,能够加速实现这一目标。 例如,在遥操作、示教等方面,基于人体做出的标准的动作示范,通过动作捕捉技术,精确捕捉手部运动数据,并将其实时传输映射到机器手上,使机器人完成对应的指令,并进行任务学习、执行和演练。由于是基于真人的数据采集,让人形机器人的手部动作,更加贴近于真人。
因时机器人遥操作
2、姿态评估及训练
动作捕捉技术在姿态评估上,具有很大的优势。对于人形机器人的训练,借助动捕不仅能够提升效率,而且能够让人形机器人更像人。一方面,借助动作捕捉,可以捕捉人体运动的数据信息,并将其转化为机器人可识别的指令。此外,在机器人运动的过程中,可以捕捉机器人的6DOF信息,测试行走、奔跑过程中的速度、加速度,收集运动过程中,关节的角度、位移方向、幅度等数据信息,评估其运动过程,进而改进运动方式及训练模型。
3、仿真训练
目前,人形机器人训练的一大难点,即是缺乏丰富的数据支持。借助仿真训练可以最大限度的降低人形机器人的训练成本。在仿真的环境中,可以1:1构建模拟各种情节,从简单的障碍物躲避,到复杂的汽车驾驶避障,通过仿真训练不仅能摆脱空间环境的限制,而且提升了训练的效率,最大限度的完成生活场景中无法实现或因成本问题难以实现的训练场景。并且,基于仿真数据与真实数据的对比分析,进而优化人形机器人的设计和控制策略。
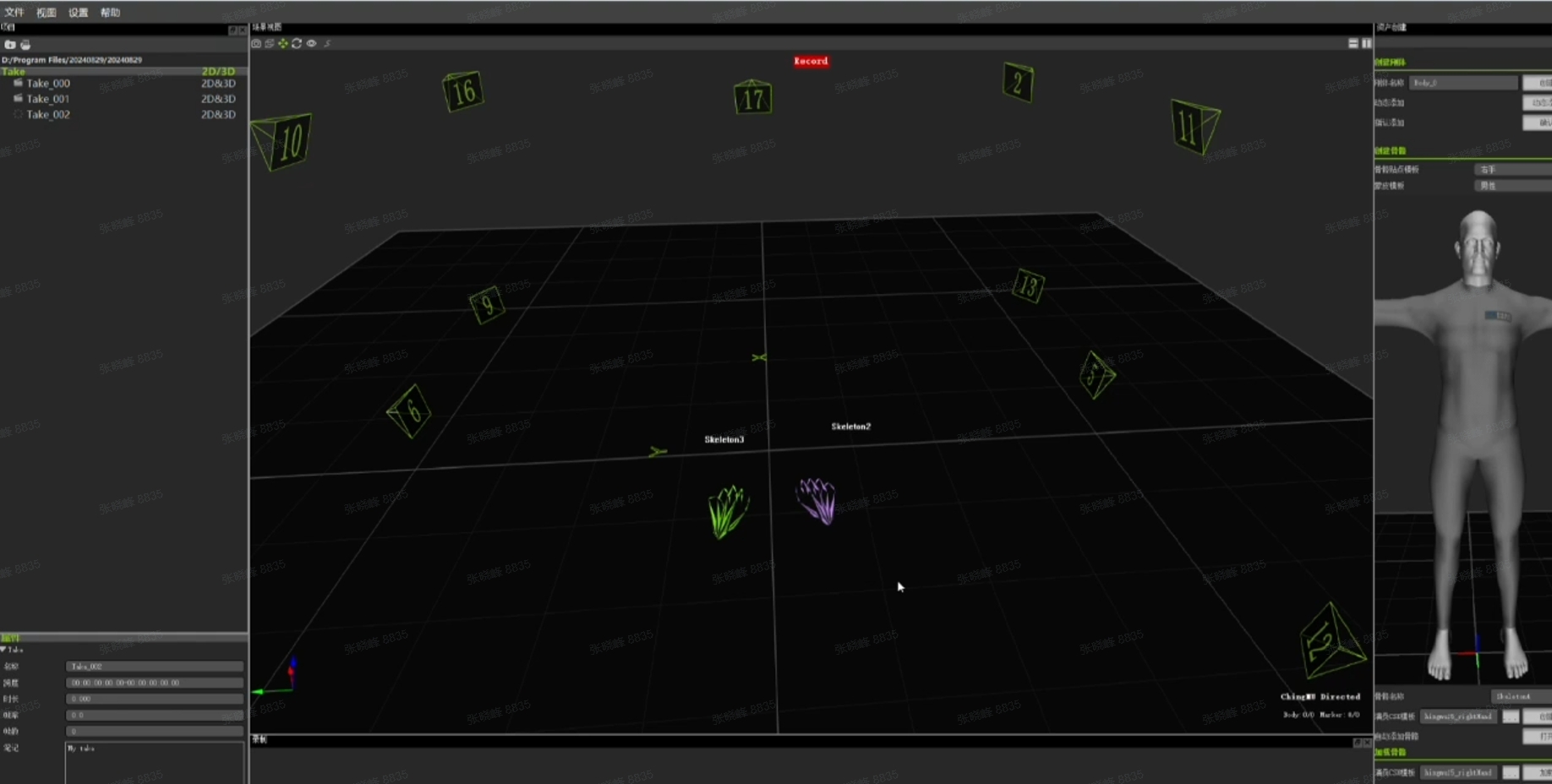
作为行业领先的光学动捕品牌,青瞳视觉为人形机器人的发展注入了新的活力。凭借高精度、低延时、广视角、强鲁棒性、多目标跟踪等优势,青瞳视觉为人形机器人(上海)有限公司,国内首款全尺寸通用人形机器人训练测试提供动捕技术支持。不仅有助于提升机器人的动作精度,更使其具备了高度的智能化和自适应能力。
人形机器人(上海)有限公司,国内首款全尺寸通用人形机器人训练测试
此外,在灵巧手研究方面,青瞳视觉光学动捕系统可对灵巧手实现实时的遥操作。表现出了动捕系统卓越的性能。此外,清华大学、浙江大学、苏州大学等国内知名高校,采用青瞳视觉光学动捕系统进行灵巧手的研究。通过动作捕捉技术,详细记录了人类手指的细微动作,并成功将这些动作数据应用于人形机器人的手指控制中。这使得机器人能够以极高的精度模仿人类的手指动作,实现了对复杂物体的精准抓取和操作。
清华大学灵巧手研究
在人形机器人机器人研究上,丰富的数据库,对于训练人形机器人极为关键,通过大量的数据收集和学习,机器人逐渐掌握了各种运动模式和反应技巧,能够在不同环境中灵活应对各种任务。光学动作捕捉系统,通过采集人体、人形机器人的数据信息,提升人形机器人的运动控制、使人形机器人更加人物化。