多轮式移动机器人编队控制
在自主系统领域,多轮式移动机器人(Wheeled Mobile Robots, WMRs)的编队控制一直是研究热点,其在协同运输等实际任务中应用广泛。然而,现有的一些研究结果往往对WMRs速度约束考虑不充分,或将WMRs线速度约束和角速度约束作为两个独立的约束考虑。实际上,对于差速WMRs,线速度约束和角速度约束是两个相互耦合的约束,分开考虑这两个约束将限制WMRs充分发挥运动性能。此外,现有的WMRs轨迹规划算法往往基于优化迭代方法,在计算实时性等方面存在提升空间。
为了解决上述问题,东南大学自动化学院机电系统控制实验室王翔宇教授团队开展了《基于单轨迹规划的速度受限多轮式移动机器人编队控制策略及在协同运输中的应用》的研究,旨在探讨速度约束下多个WMRs如何沿着给定路径将货物从起始点运输到目的地,从而为多WMRs协同运输任务提供更有效的解决方案。该研究成果已发表在控制领域著名期刊《IEEE Transactions on Control Systems Technology》上:Quanwei Wu, Guodong Wang, Xiangyu Wang*. A Formation Strategy Relying on Monotrajectory Planning for Velocity-Constrained Wheeled Mobile Robots With Application to Cooperative Transportation. IEEE Transactions on Control Systems Technology, 2025, 33(6): 2080-2091。
一、研究方案:
研究团队提出了一种基于单轨迹规划的编队控制策略,该策略包括两大核心部分:(1)虚拟领导者部分—通过反馈控制方法构建虚拟领导者,并考虑WMRs线速度约束与角速度约束的统一形式,为所有速度受限WMRs规划出可行轨迹,无需反复迭代,实时性大幅提升;(2) 编队控制部分—基于嵌入式控制技术分别设计分布式参考信号发生器与跟踪控制器,确保WMRs精准跟踪轨迹,同时形成并维持期望编队。
算法优势:
1. 实时性好:所提策略采用反馈控制与协调控制方式有效实现在线轨迹规划功能,无需通过多次迭代寻找最优解,具备更好的实时性。
2.效率高:与未考虑速度约束的方法相比,所提策略既考虑了所有WMRs的速度约束,又充分发挥了WMRs的机动性,可使WMRs更快地完成任务。
3.工程适用性强:所提策略将线速度约束与角速度约束整合为统一的速度约束形式。由于这两种约束都与WMRs的电机转速约束相关,该统一形式能更准确反映实际工程场景。
二、实验验证:
实验在3.8米×4.5米的场地内进行,研究团队进行了编队实验和协同运输实验。实验装置由CHINGMU青瞳视觉动作捕捉系统、3个WMRs、一个运输平台组成。每个WMR由支撑装置、下位机STM32 F407、上位机NVIDIA Jetson Xavier NX和多个标记物等组成。任务目标为WMRs组成边长为0.8米的等边三角形并跟踪虚拟领导者。虚拟领导者的功能由WMR1执行。运输平台根据WMRs的期望队形设定,为边长为1米的等边三角形。其中,WMRs形成的等边三角形中心与运输平台的中心重合,且其边与运输平台的边平行。运输对象期望轨迹的起点与运输开始时WMRs编队质心重合。
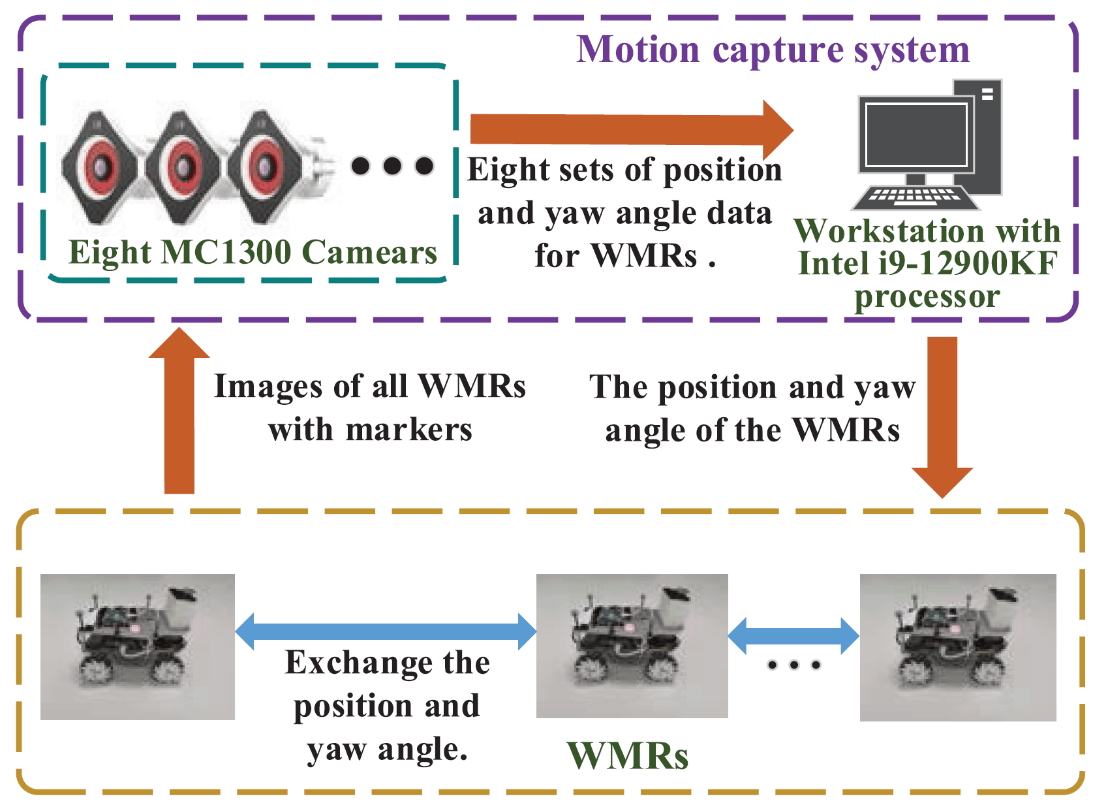 *图1 实验设备数据流示意图
*图1 实验设备数据流示意图
基于青瞳视觉MC1300动捕系统亚毫米级定位及高精度捕捉的优势,实时定位采集WMRs的位置、航向角、行驶轨迹等运动信息,为算法验证提供精确的数据参考,保障了实验的真实有效性。
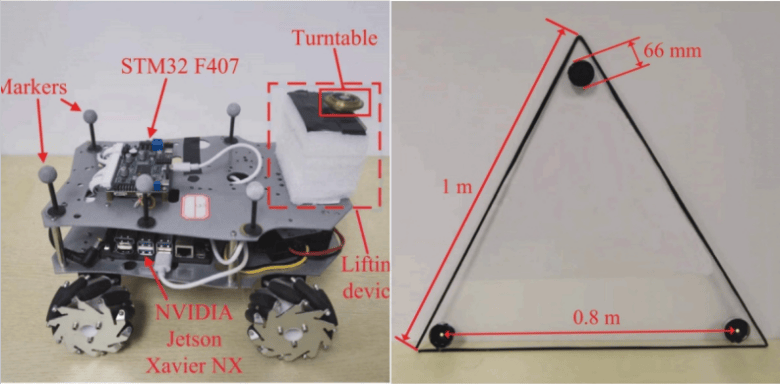
*图2 WMR和运输平台图示

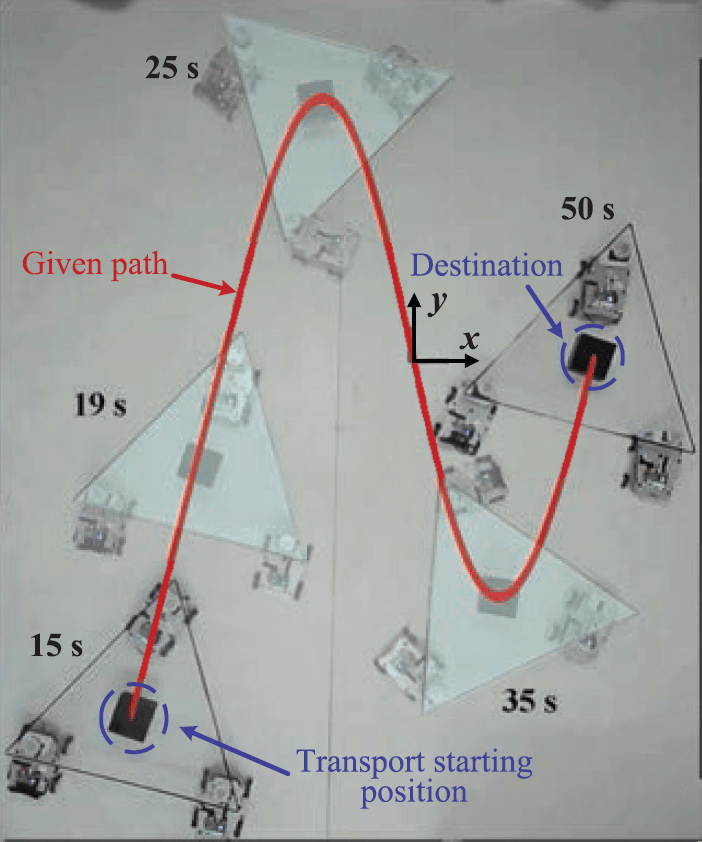 *图4协同运输实验过程
*图4协同运输实验过程
 *图5 给拟领导者和WMRs的轨迹
*图5 给拟领导者和WMRs的轨迹
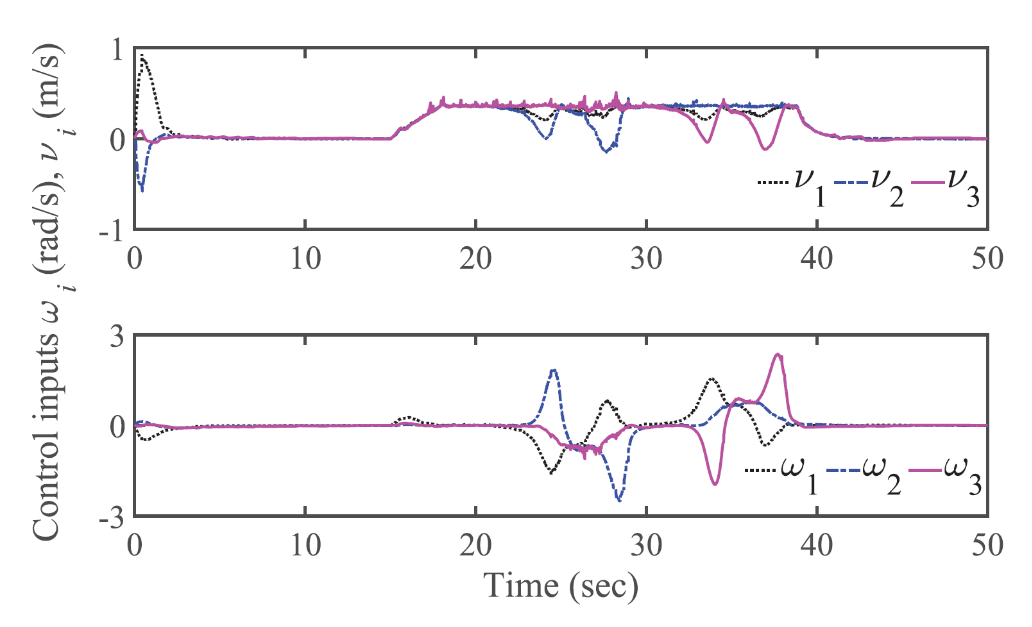 * 图6 WMRs的控制输入
* 图6 WMRs的控制输入
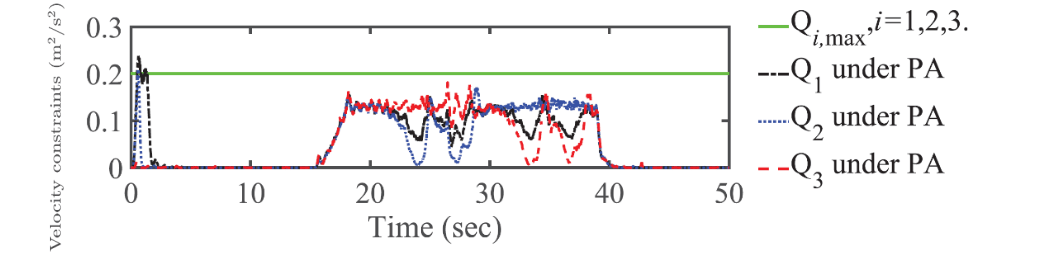 * 图7 WMRs的速度响应曲线
* 图7 WMRs的速度响应曲线
三、实验成果:
本文研究了速度受限WMRs的编队控制问题,并提出一种基于单轨迹规划的新型编队控制策略。采用该策略,速度受限WMRs能高效地形成期望的编队队形,并在沿给定路径移动的过程中维持该队形。所提策略还被应用于协同运输任务中。实验验证了所提策略的高效率和优良性能。
参考文献:
[1] J. Alonso-Mora, S. Baker, and D. Rus, “Multi-robot formation control and object transport in dynamic environments via constrained optimization,” Int. J. Robot. Res., vol. 36, no. 9, pp. 1000–1021, 2017.
[2] X. Wang, W. Liu, Q. Wu, and S. Li, “A modular optimal formation control scheme of multiagent systems with application to multiple mobile robots,” IEEE Trans. Ind. Electron., vol. 69, no. 9, pp. 9331–9341, 2022.
[3] Q. Wu, X. Wang, and X. Qiu, “Embedded technique-based formation control of multiple wheeled mobile robots with application to cooperative transportation,” Control Eng. Pract., vol. 150, 2024, Art. no. 106002.
[4] R. Adderson, B. Akbari, Y.-J. Pan, and H. Zhu, “Multileader and role-based time-varying formation using GP inference and sliding mode control,” IEEE/ASME Trans. Mechatronics, vol. 29, no. 6, pp. 4744–4754, 2024.
[5] A. J. H¨ausler, A. Saccon, A. P. Aguiar, J. Hauser, and A. M. Pascoal, “Energy-optimal motion planning for multiple robotic vehicles with collision avoidance,” IEEE Trans. Control Syst. Technol., vol. 24, no. 3, pp. 867–883, 2016.
[6] J. Li, M. Ran, and L. Xie, “Efficient trajectory planning for multiple non-holonomic mobile robots via prioritized trajectory optimization,” IEEE Robot. Autom. Lett., vol. 6, no. 2, pp. 405–412, 2021.
[7] R. Olfati-Saber and R. M. Murray, “Consensus problems in networks of agents with switching topology and time-delays,” IEEE Trans. Autom. Control, vol. 49, no. 9, pp. 1520–1533, 2004.
[8] W. Ren and E. Atkins, “Distributed multi-vehicle coordinated control via local information exchange,” Int. J. Robust Nonlinear Control, vol. 17, nos. 10–11, pp. 1002–1033, 2007.
[9] A. Morro, A. Sgorbissa, and R. Zaccaria, “Path following for unicycle robots with an arbitrary path curvature,” IEEE Trans. Robot., vol. 27, no. 5, pp. 1016–1023, 2011.
[10] X. Wang, G. Wang, and S. Li, “Distributed finite-time optimization for integrator chain multiagent systems with disturbances,” IEEE Trans. Autom. Control, vol. 65, no. 12, pp. 5296–5311, 2020.
[11] D. H. Hristu-Varsakelis and W. S. Levine, Handbook of Networked and Embedded Control Systems. Basel, Switzerland: Birkh¨auser Verlag, 2005.
[12] W. Dixon, D. Dawson, F. Zhang, and E. Zergeroglu, “Global exponential tracking control of a mobile robot system via a PE condition,” IEEE Trans. Syst., Man, Cybern., B (Cybern.), vol. 30, no. 1, pp. 129–142, 2000.