近日,东南大学自动化学院王翔宇教授团队的研究论文“Hierarchical Consensus of Constrained Second-Order Multiagent Systems With Application to Formation of Multiple Mobile Robots”(受限二阶多智能体系统的分层一致性及其在多移动机器人编队中的应用)以长文(Full Paper)形式发表在控制领域两大顶刊之一的《IEEE Transactions on Automatic Control》(2026, 71(2): 886-901)上。该论文提出了一种新颖的受限多智能体系统分层协同控制方案,得到国家自然科学基金等项目的资助。
一、研究方案
论文基于分层协同控制框架提出了一种新型两层式约束协同控制方案,研究了速度受限领导者-跟随者二阶多智能体系统的一致性问题,具体设计包括约束分布式参考信号发生器设计和各智能体速度约束跟踪控制器设计。
方案优势:
- 所提方案具备分层协同控制框架的优点,如高灵活性、低设计复杂度以及强通用性和可扩展性。此外,所提方案提供了一种新颖的双向设计思路,即上层的约束分布式参考信号发生器可有机利用各智能体的速度约束信息,成功将分层协同控制框架的适用范围扩展到受限多智能体系统的协同控制问题。
- 在考虑速度约束的情况下,设计了一种约束分布式参考信号发生器,该发生器不仅为各跟随者智能体生成与领导者智能体可实现渐近一致性的参考信号,而且考虑了速度约束条件,使由发生器生成的各跟随者智能体参考速度满足各自约束条件。
通过非线性映射控制方法,为各跟随者智能体设计了一种新型约束跟踪控制器。相比于传统方法,所提速度约束跟踪控制器避免了过大控制量且控制器参数选择更灵活。
图1 受限多智能体系统分层协同控制方案
二、实验验证
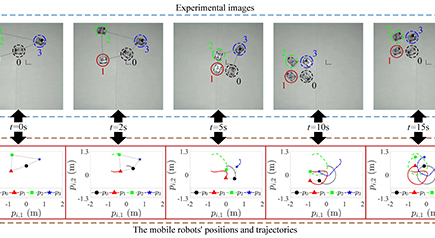
论文将所提方案应用于速度受限多移动机器人的编队任务中,并通过实验验证了所提控制方案的有效性。实验在3.8米×4.5米的场地内进行,实验装置由青瞳视觉动作捕捉系统、4个移动机器人(1个领导者和3个跟随者)组成。每个移动机器人由下位机STM32 F407和上位机NVIDIA Jetson Xavier NX等组成。任务目标为4个移动机器人组成边长为0.5米的正方形编队。基于青瞳视觉MC1300动捕系统的亚毫米级定位及高精度捕捉的优势,实时定位采集WMRs的位置、航向角、行驶轨迹等运动信息,为算法验证提供精确的数据参考,保障了实验的真实有效性。
图2 实验图像和各移动机器人在不同时刻的位置、轨迹
图3 各移动机器人实际速度响应曲线(均满足各自约束条件)
参考文献
[1] R. S. Sharma, A. Mondal, and L. Behera, “Tracking control of mobile robots in formation in the presence of disturbances,” IEEE Trans. Ind. Informat., vol. 17, no. 1, pp. 110-123, Jan. 2021.
[2] K. Fathian, S. Safaoui, T. H. Summers, and N. R. Gans, “Robust distributed planar formation control for higher order holonomic and nonholonomic agents,” IEEE Trans. Robot., vol. 37, no. 1, pp. 185-205, Feb. 2021.
[3] Y. Tang, Z. Deng, and Y. Hong, “Optimal output consensus of high-order multiagent systems with embedded technique,” IEEE Trans. Cybern., vol. 49, no. 5, pp. 1768-1779, May 2019.
[4] X. Wang, G. Wang, and S. Li, “Distributed finite-time optimization for integrator chain multiagent systems with disturbances,” IEEE Trans. Autom. Control, vol. 65, no. 12, pp. 5296-5311, Dec. 2020.
[5] G. Wang, X. Wang, and S. Li, “A guidance module based formation control scheme for multi-mobile robot systems with collision avoidance,” IEEE Trans. Autom. Sci. Eng., vol. 21, no. 1, pp. 382-393, Jan. 2024.
[6] X. Wang, Y. Xu, Y. Cao, and S. Li, “A hierarchical design framework for distributed control of multi-agent systems,” Automatica, vol. 160, article no. 111402, pp. 1-18, Feb. 2024.
[7] T. C. Lee, K. T. Song, C. H. Lee, and C. C. Teng, “Tracking control of unicycle-modeled mobile robots using a saturation feedback controller,” IEEE Trans. Control Syst. Technol., vol. 9, no. 2, pp. 305-318, Mar. 2001.
[8] Z.-P. Jiang, E. Lefeber, and H. Nijmeijer, “Saturated stabilization and tracking of a nonholonomic mobile robot,” Syst. Control Lett., vol. 42, no. 5, pp. 327-332, Apr. 2001.
[9] C. Wang, “Semiglobal practical stabilization of nonholonomic wheeled mobile robots with saturated inputs,” Automatica, vol. 44, no. 3, pp. 816-822, Mar. 2008.
[10] J. Moreno-Valenzuela, L. Montoya-Villegas, R. Pérez-Alcocer, and J. Sandoval, “A family of saturated controllers for UWMRs,” ISA Trans., vol. 100, pp. 495-509, May 2020.