上海理工大学

上海理工大学:输入幅值和速率约束的多智能体系统分布式控制算法及其在无人机协同中的应用
无人机分布式协同控制的研究不仅能解决实际应用中的诸多问题,还能推动相关科学技术的进步和发展,对军事、民用及科研领域具有重要的意义和应用价值。无人机控制输入常常受到幅值和速率的限制,如执行器饱和、外界环境要求等。这些限制给传统的无人机协同算法带来了巨大的挑战。
近期,上海理工大学机器智能研究院团队,在多智能体系统输入幅值和速率约束的一致性控制及其在无人机协同控制方面取得了显著研究成果。目前该论文已在全球控制领域知名期刊《IEEE Transactions on Automation Science and Engineering》上发表。
一、研究方案
研究团队提出了一种集成速度阻尼和新型非线性饱和函数的分布式控制方法,在不违反输入幅值和速率限制的情况下,实现多智能体状态的一致性。该论文主要分为三部分,一部分是理论设计:针对多智能体系统输入幅值和速率限制条件下的一致性问题,巧妙集成速度阻尼项与非线性饱和函数,提出适用于无向通讯拓扑和有向通讯拓扑的分布式控制算法。第二部分是收敛性证明与仿真:利用Barbalat引理和代数图理论,对控制算法进行了严谨的理论分析和证明,确保算法能够实现渐近一致且满足输入限制条件,并利用仿真验证了算法的有效性。最后一部分是应用与实验验证:将理论成果应用于四旋翼无人机的协同控制问题,并搭建了实验平台进行对比实验。实验表明,所提出算法不仅可以满足输入约束,实现无人机分布式协同控制,还展示了算法对干扰的鲁棒性。
算法优势:
1、控制约束。算法确保无人机在运动过程中严格遵守输入幅值和速率约束。
2、鲁棒性。受到人为干扰后,无人机能够迅速重新编队。
3、性能优越。与传统一致性算法相比,所提出的算法在轨迹平滑度和超调方面表现更优。
二、实验验证
研究团队在2米×2米的场地内进行了四旋翼无人机的编队实验。如图1所示,实验环境包括青瞳视觉(CHINGMU)动作捕捉系统、四个Crazyflie 2.1无人机、一个搭载Linux操作系统的地面站,控制目标是使无人机形成边长1.1米的正方形编队。基于动捕系统亚毫米级定位及高精度捕捉的优势,可以实现实时定位采集无人机的位姿、飞行轨迹等运动信息,为算法验证提供精确的数据参考,保障了实验的真实有效性。

图1 实验装置数据流示意图
图2表明,无人机在7秒时实现分布式协同。通过对比实验(图5),表明了在使用所提出的算法时,无人机的轨迹更为平滑,超调更小。
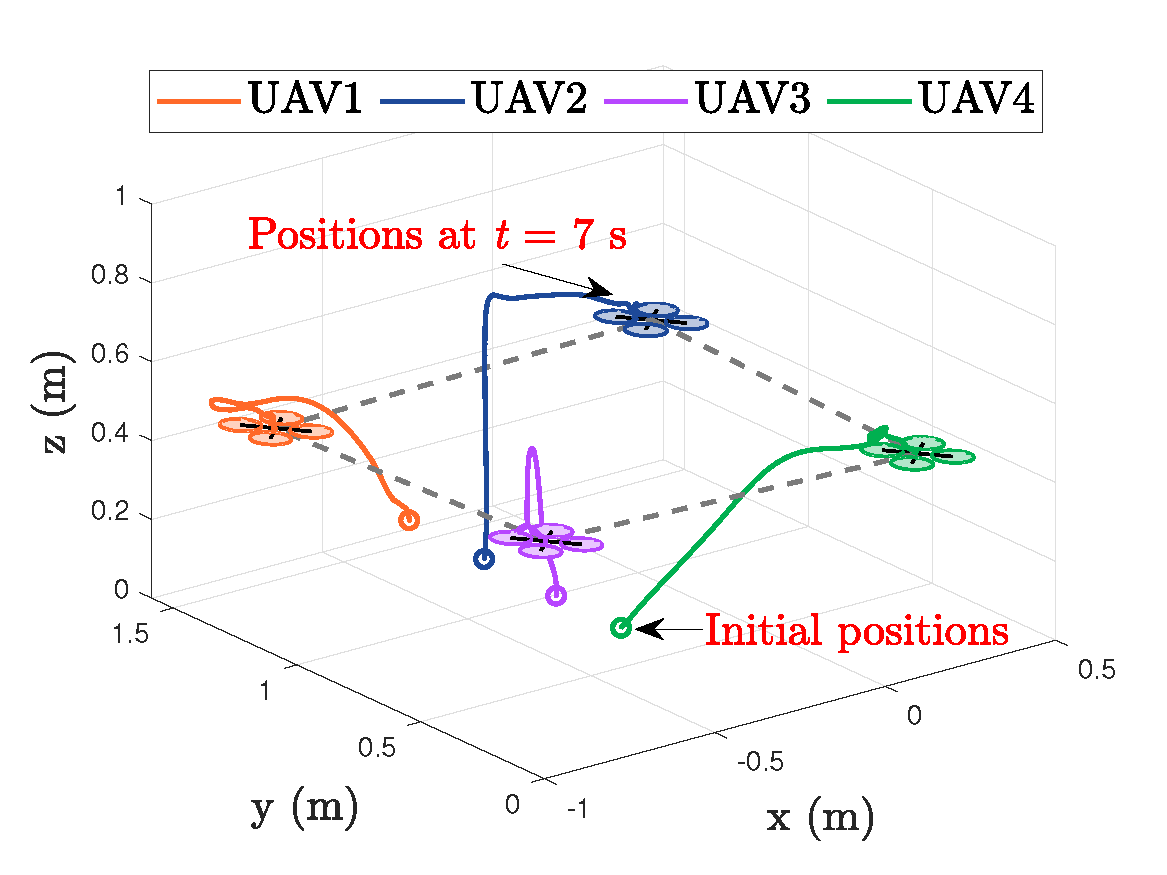
图2 无人机在所提出算法下三维轨迹图
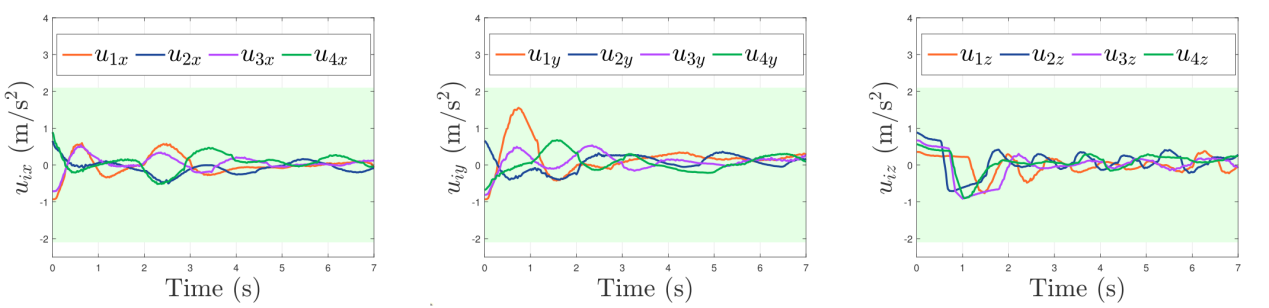
图3 所提出算法控制信号曲线(绿色区域表示幅值约束)
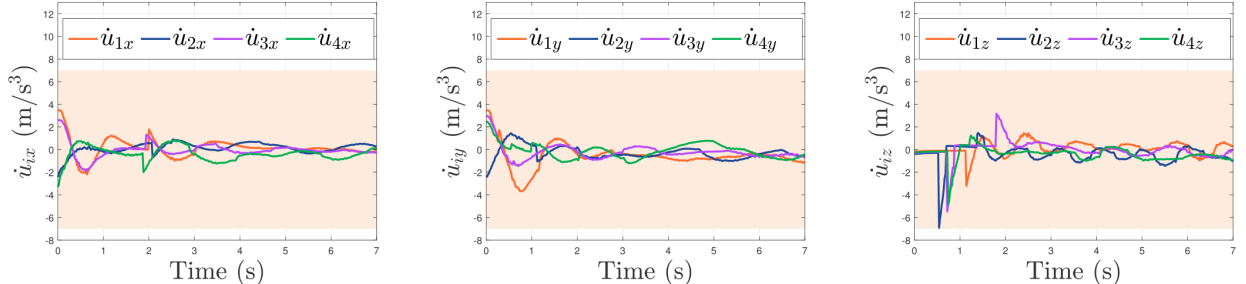
图4 所提出控制信号速率曲线(桃色块表示速率约束)
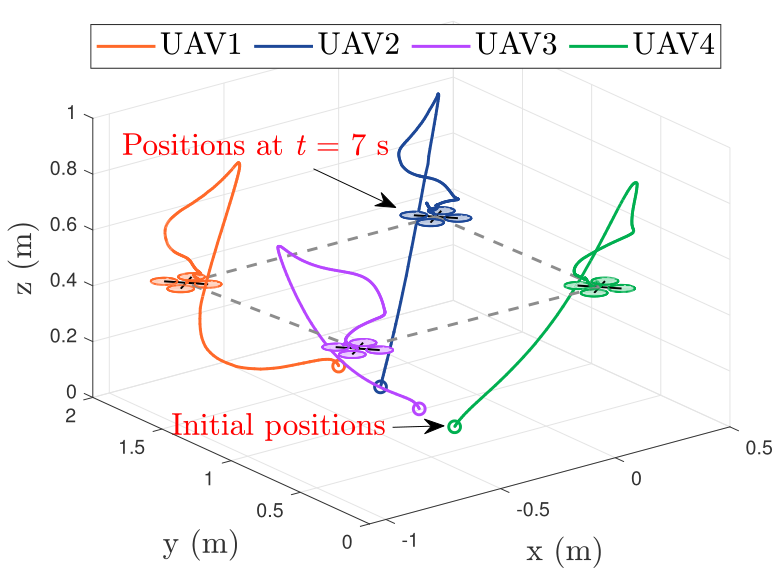
图5 对比实验:无人机在传统算法下三维轨迹图
三、结果与讨论
实验结果表明无人机能够快速实现分布式协同,并且通过使用所提出的算法,无人机的运动轨迹更为平滑,超调更小。相比之下,使用未考虑输入限制的传统协同算法时,无人机的轨迹表现出较大的超调和振荡。此外,针对该算法对干扰的鲁棒性进行了进一步验证。在无人机实现编队队形后,通过手动移动其中一个无人机的位置,使其偏离原本编队,但无人机仍能快速重新形成期望编队。
在执行器饱和、外界环境约束的情况下,智能体的控制输入不可避免地受到限制。这种限制可能导致传统算法控制性能下降,甚至在严重的情况下导致闭环系统不稳定。本研究方法能够在不违反预定义的输入幅值和速率限制的情况下实现智能体一致性控制。无人机分布式协同控制的实验表明,所提出的算法具有实际应用价值,并得到了令人满意的控制性能。
论文链接:
https://ieeexplore.ieee.org/abstract/document/10639419

- 上一篇:温州大学 扑旋翼研究
- 返回列表
- 下一篇:上海大学