上海大学

近期,上海大学机电工程与自动化学院副研究员饶进军博士带领研究团队对于未来研究多架无人机的协同飞行问题的理论和实际意义,在《Knowledge-Based Systems》(SCI,Q1 Top IF=8.8) 期刊发表了题为《基于人工势场-A*算法的双机协同悬挂运输路径规划》的学术论文。上海大学机电工程与自动化学院副研究员饶进军博士为第一作者,上海大学为第一作者单位和通讯单位。
近年来,无人机作为空中机器人发挥了不可替代的作用。四旋翼能够在狭小的空间内飞行,其具有低噪声、无污染,携带方便等特点,非常适用于执行中短距离的飞行任务。因此其经常携带不同负载执行各种研究任务,被广泛用于航拍测绘、农林植保、电力巡检等工农领域。由于四旋翼结构尺寸小,续航时间短等一系列问题,导致单个四旋翼执行负载运输能力不足,远远不能提供实际应用价值,而多架无人机可以通过能力互补和行动协调,实现整个系统效能的提升,大大提高系统负载运输能力。
四旋翼无人机广泛应用于负载运输任务,对于小体积的重型载荷,多架四旋翼协同运输的方案更具有实用价值。针对多无人机协同运输任务进行研究,实现无人机协同悬挂负载的运输试验测试,以提高四旋翼悬挂负载的能力,这对于未来研究多架无人机的协同飞行问题具有重要的理论和实际意义。
为实现四旋翼安全高效的协同悬挂运输任务,文章针对双四旋翼的协同运输系统的路径规划方案进行研究,提出一种新型的人工势场-A*算法。该算法通过引入排斥力思想对启发函数进行优化,使四旋翼与障碍物保持安全距离飞行;基于人工势场理论定义双机协同运输的策略。这种方法保证在寻找最优路径的同时提高搜索效率,而且能有效抑制负载的摆角运动,确保负载运输的安全。
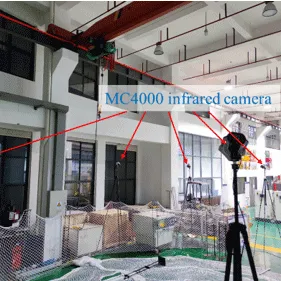
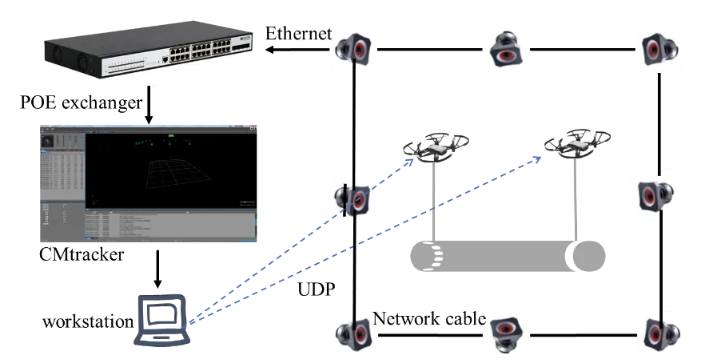
基于Airsim虚拟场景和真实场地测试,对四旋翼无人机的协同飞行控制和路径规划进行联合仿真与实验,其中实验平台采用来自上海青瞳视觉科技有限公司的高精度红外光学动作捕捉系统搭建而成。
结果表明该算法能为双机协同运输系统提供安全可靠的导航轨迹,实现了僚机在障碍物处附近改变队形,确保负载的安全运输。论文提出的引入排斥力思想的人工势场-A*算法相较于原始的A*算法在路径规划方面具有更好的性能, 分别减少了近60%和53.75%的搜索时间和搜索网格数。危险节点数明显减少,与优势算法相比较而言极大地提高了搜索效率,提供可靠的导航轨迹。
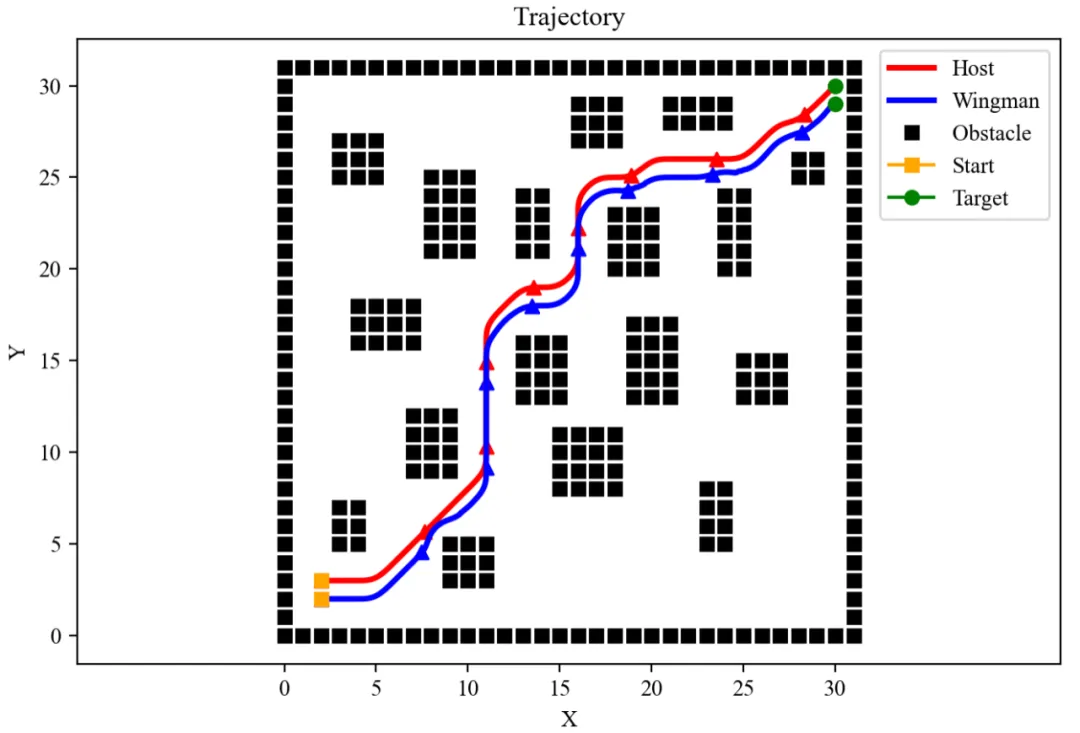
△ APF-A*算法在规划双机协同路径的演示
联合仿真和实验测试的结果共同表明,多旋翼能与障碍物保持一定的安全距离,并沿着安全的飞行走廊实现负载的运输,确保运输系统不会与障碍物发生碰撞。
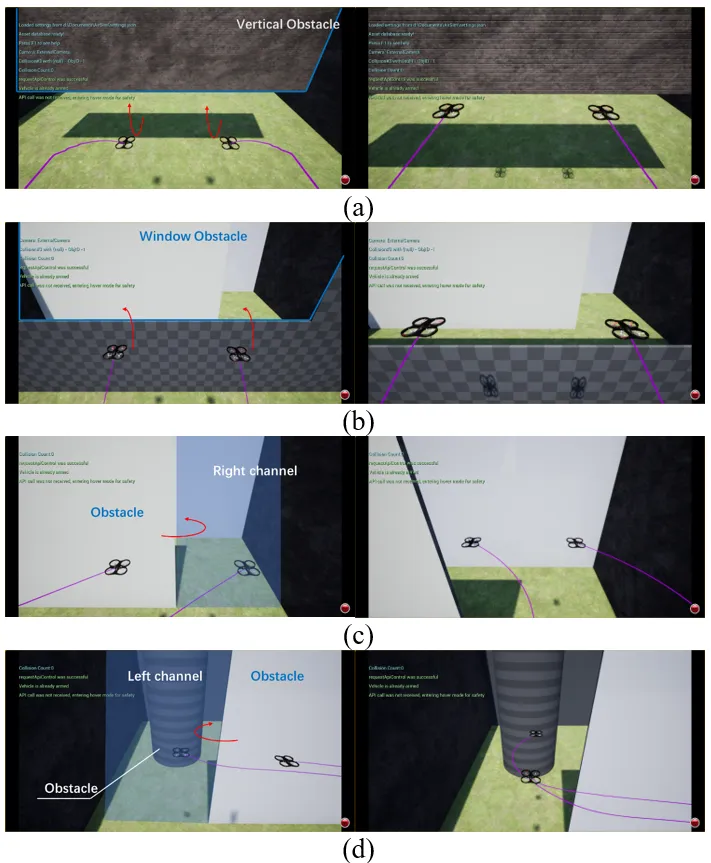
该算法确保僚机在感知障碍物处改变队形实现避障飞行,确保了负载运输任务的顺利完成,提高了悬挂负载的四旋翼运输系统的安全性。现实的外部环境中存在着许多不确定性干扰。所以在未来的研究中,将考虑在模拟仿真中加入更多的干扰因素,如风速、气流、动态干扰物等,以提高算法的适用性,拓宽四旋翼负载运输的使用场景。
论文链接:
https://doi.org/10.1016/j.knosys.2023.110797