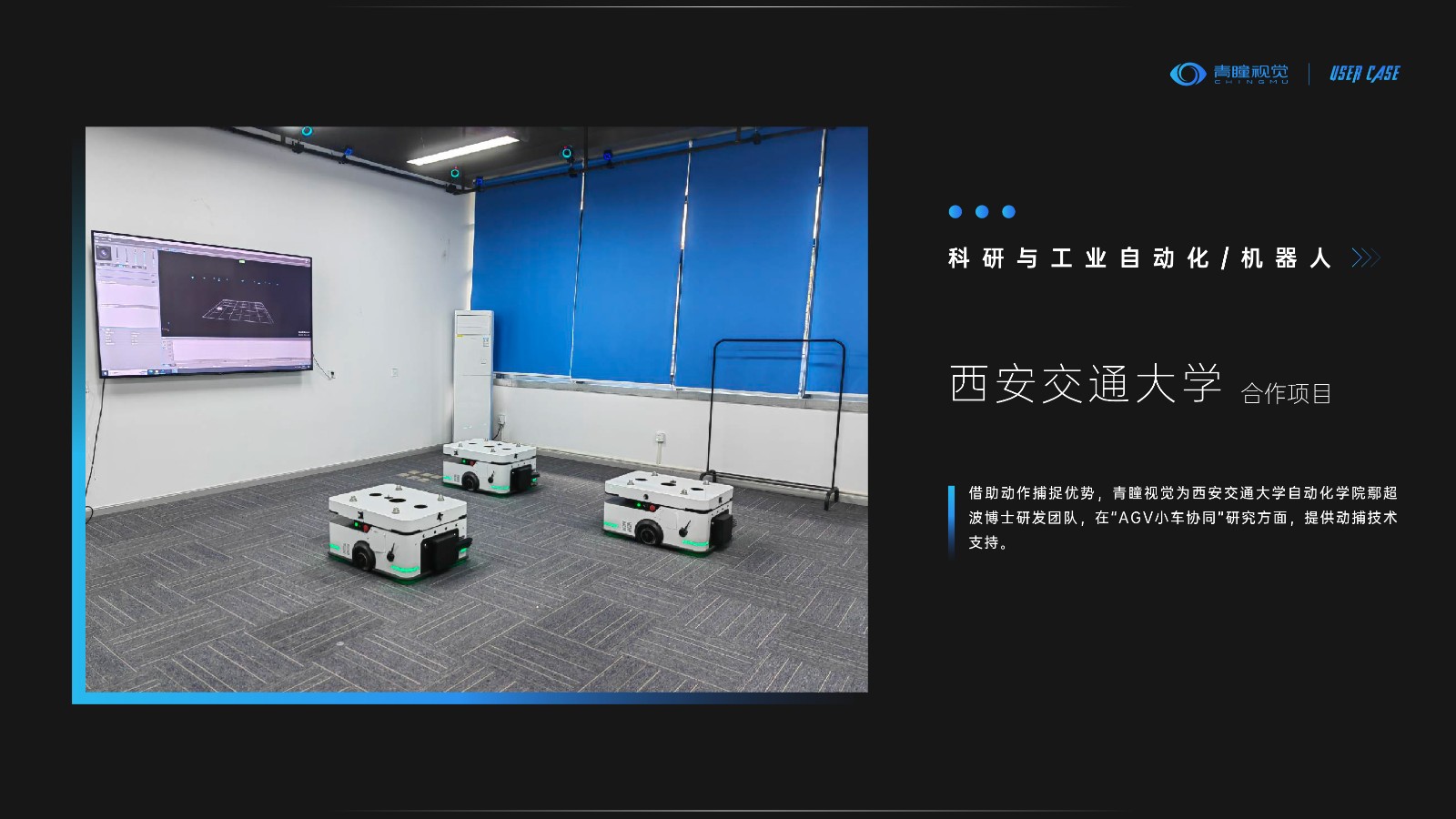
青瞳视觉(CHINGMU)借助自主研发的动作捕捉技术,为西安交通大学自动化学院鄢超波博士及其研发团队增添助推力,为其开展的“AGV协同小车”课题研究提供动捕技术支持及全套解决方案。
研究内容涵盖了路径规划、避障、安全距离测试、自主导航以及多台小车的协同跟踪等多个方面。借助动捕系统,将小车的个体信息、整个小车群的相对位置信息,比如行驶过程的速度、方向、转弯角度等信息进行可视化呈现,为算法验证提供更有力的支撑。通过演练测试、与预定指令的对比、调整,进一步提升小车协同控制的精度和完成任务的效率。
CHINGMU 在这里为您的动作捕捉之旅提供支持。我们很乐意帮助您找到所需的解决方案。
立即联系我们的专家