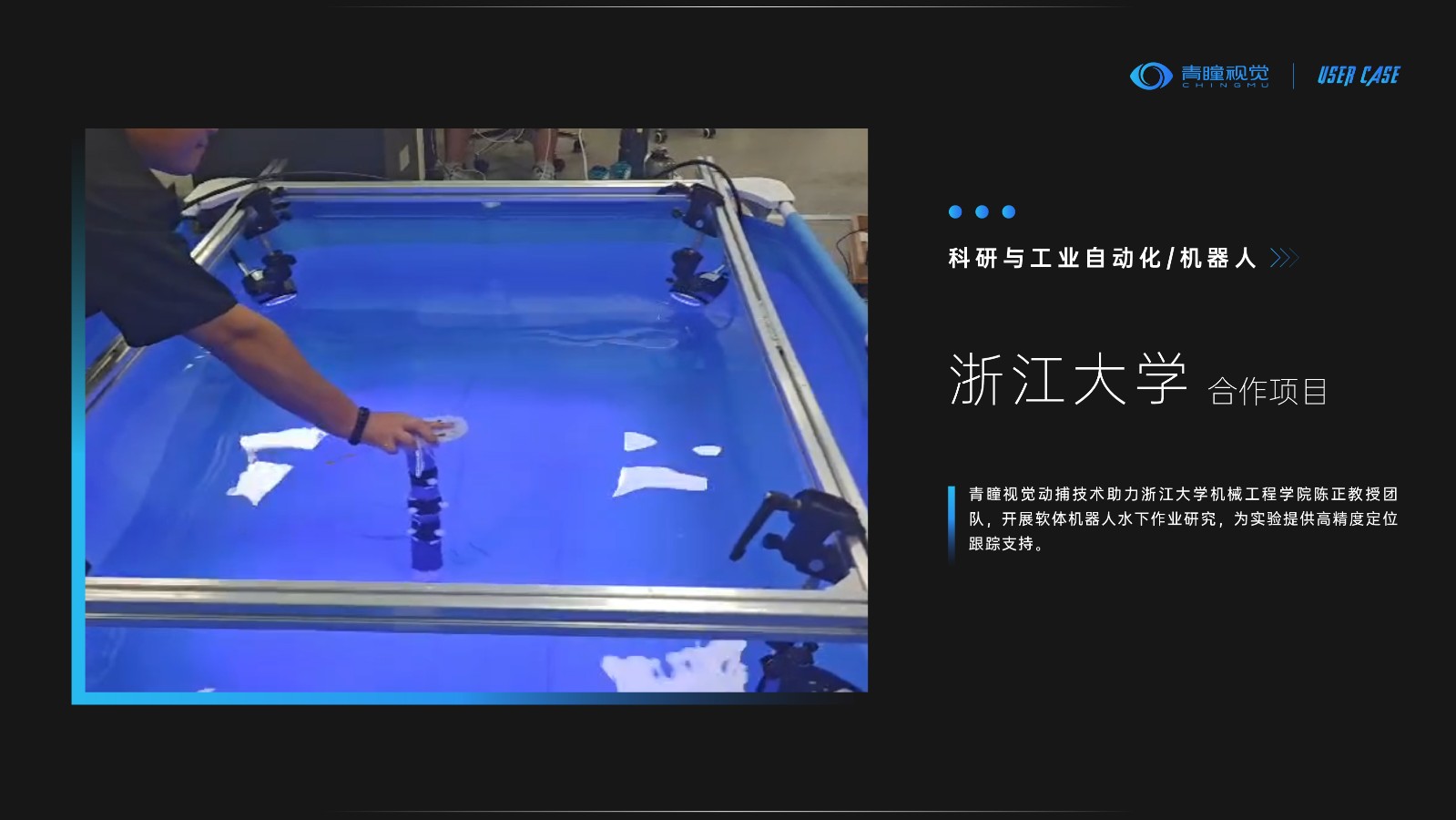
高效率、高质量水下探索研究。青瞳视觉(CHINGMU)助力浙江大学机械工程学院陈正教授团队,开展软体机器人水下作业研究。借助高精准水下光学动捕系统,对机器人的位置和运动轨迹进行实时精确测量,提供可视化的数据支持分析,验证机器人水下控制算法研究,进而提升水下机器人运动的效率及机动性,为软体机器人在水下探索、监控、检查,参与水下救援等提供重要的数据支持及经验积累。
CHINGMU 在这里为您的动作捕捉之旅提供支持。我们很乐意帮助您找到所需的解决方案。
立即联系我们的专家