近年来,我国无人机产业得到蓬勃发展,从军事应用到科学研究、商业演出、紧急救援、环境监测以及物流运输等多个领域,以其卓越的性能和灵活性,不断拓展着应用的边界。据中商产业研究院发布的《2025-2030中国无人机行业市场研究及前景预测报告》显示,2023年中国民用无人机市场规模达1174.3亿元,同比增长32%。预计2024年中国民用无人机市场规模将达1409.2亿元,2025年达到1691亿元。中国无人机运营企业数量从2019年的7149家增长到2023年的19825家,年均复合增长率约29.05%。
然而,随着无人机产业的快速发展,市场对无人机的性能、安全性以及应用场景的要求也在不断提升。如何打造出具有高机动性、高安全性,并能够实现“人机合一”境界的无人机,已成为当前各大高校、科研机构以及专家学者们共同面对的研究课题和攻关方向。
针对无人机的研究,光学动捕技术的应用,为无人机的发展提供了新的突破和研究思路,通过精准的定位跟踪,可视化的同步数据解析,为无人机空间定位、穿越障碍、自主导航、协同控制、算法研究验证等提供了精确、完整的数据支持,这一技术的应用不仅大幅提升了无人机研究的效率,更使得无人机的运行更加稳定可靠,任务执行的精准度和复杂度也得以显著提升。
动捕系统在无人机上的应用
1、空间定位
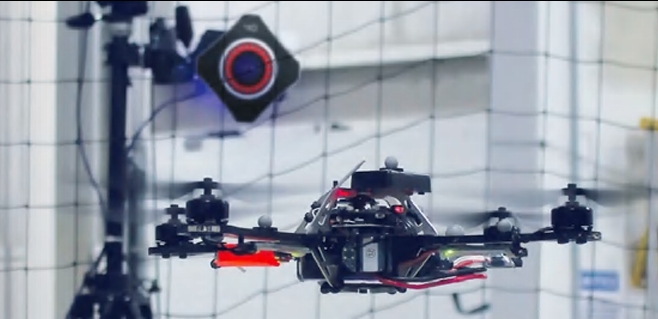
通过部署的高精红外相机,对无人机身上marker球进行捕捉,基于获取的marker球的三维空间位置,进而实时解析无人机的位置信息,例如三维空间位置、相对位置等数据。
2、动态解析
动捕系统能够实时解析无人机的6DOF数据,包括偏航角(Yaw)、横摇角(Roll)、俯仰角( Pitch),欧拉角、速度、加速度等数据,这些数据为无人机的控制研究提供了精确的数据支持,有助于提升无人机的飞行性能和稳定性。
3、算法验证
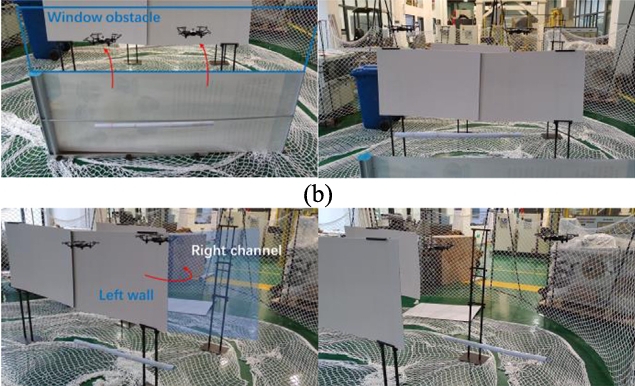
通过高精度的定位测量,获取无人机的运动轨迹、姿态等数据信息,有利于进行无人机自主避障导航、穿越控制、姿态控制、编队飞行、自适应控制、着陆控制等算法验证。
此外,动捕系统还可以用于无人机/车、机器狗、水下机器人等异构协同控制研究、地空协同控制、海地空等的研究场景。
青瞳视觉动捕系统及其应用
青瞳视觉光学动捕系统具备高精度、低延时、广视角、多目标跟踪的优势特点,空间定位精度0.1mm,角度精度0.1°,抖动误差仅0.01mm,可捕捉刚体、柔体、四足动物等目标,可视化呈现三维空间位置、6DoF数据信息,适用于水上水下、室内室外、大空间等不同场景需求。并且,提供具备完善、定制化的解决方案。
在无人机研究方面,青瞳视觉光学动捕系统凭借其高精度的定位跟踪性能和稳定流畅的数据呈现输出,赢得了众多高校和科研机构的青睐。复旦大学、上海交通大学、北京理工大学、西安电子科技大学、广西大学、上海大学以及温州大学等高校均采用了青瞳视觉光学动捕系统进行无人机的控制研究、算法验证以及编队飞行实验。借助动捕技术,在减低研究成本的同时,也助力了实验的高效精准完成。
部分案例呈现:
上海大学机电工程与自动化学院
为研究多架无人机的协同飞行问题,开展《基于人工势场-A*算法的双机协同悬挂运输路径规划》的主题研究。研究成果在《Knowledge-Based Systems》上发表。研究中基于Airsim虚拟场景和真实场地测试,对四旋翼无人机的协同飞行控制和路径规划进行联合仿真与实验,为确保实验的效果,获取精确的数据信息,实验平台采用青瞳视觉高精度红外光学动作捕捉系统搭建而成。
上海理工大学机器智能研究院
研究团队提出了一种集成速度阻尼和新型非线性饱和函数的分布式控制方法,在不违反输入幅值和速率限制的情况下,实现多智能体状态的一致性。该研究成果在国际控制领域知名期刊《IEEE Transactions on Automation Science and Engineering》上发表。
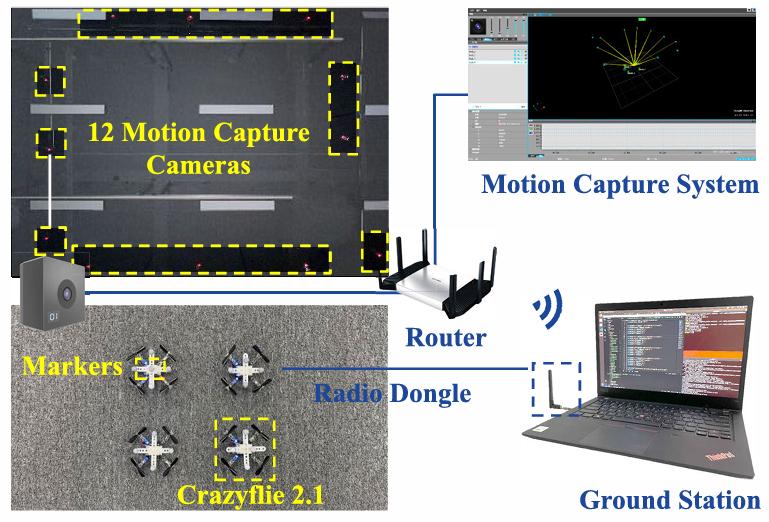
本次研究中,实验环境包括青瞳视觉(CHINGMU)动作捕捉系统、四个Crazyflie 2.1无人机、一个搭载Linux操作系统的地面站。基于动捕系统亚毫米级定位及高精度捕捉的优势,可以实现实时定位采集无人机的位姿、飞行轨迹等运动信息,为算法验证提供精确的数据参考,保障了实验的真实有效性。
温州大学机电工程学院陈思及其研究团队
为了解决新型扑旋翼(Flapping Wing Rotor, FWR)的升力问题,研究团队开展了《俘能技术对可飞行扑旋翼系统气动效率的增强效应研究》,研究成果在工程技术领域知名期刊《SCIENCE CHINA Technological Sciences》上发表。
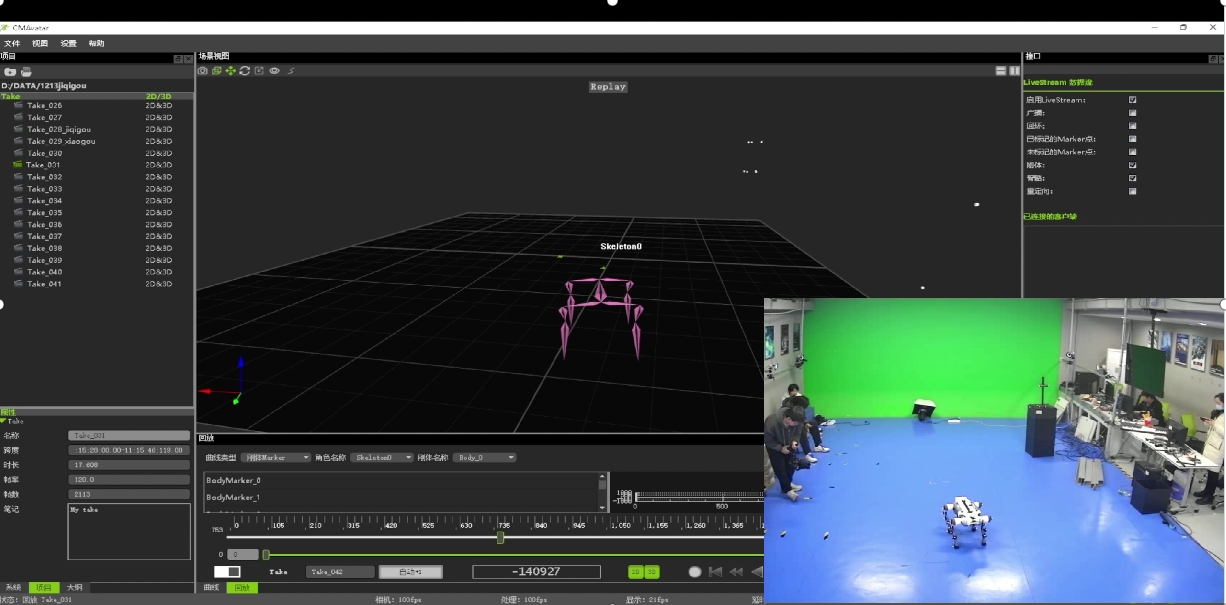
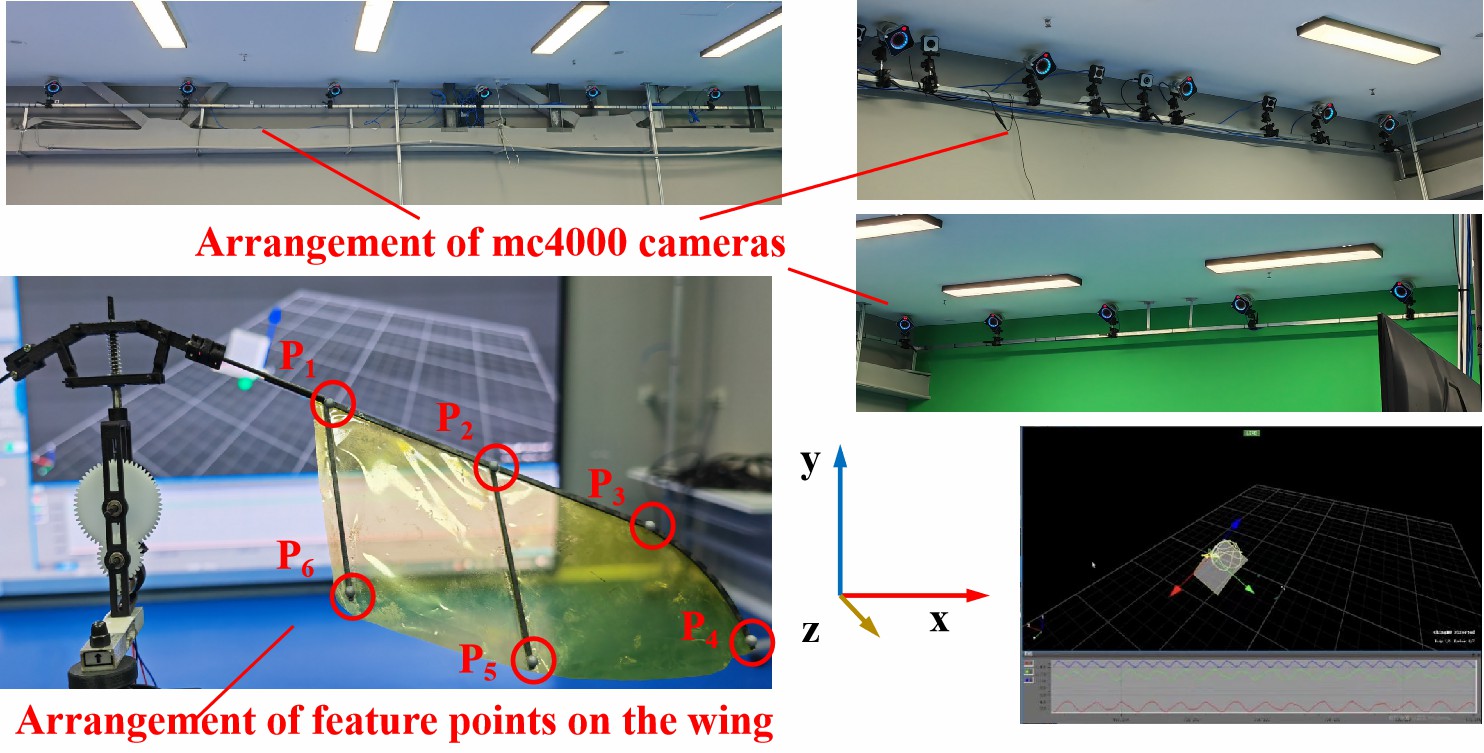
该实验由升力测试系统、飞行系统、动作捕捉系统等组成。实验中采用CHINGMU(青瞳视觉)光学动捕系统可对FWR的物理运动进行精确的捕捉呈现,以保障实验数据的可靠有效性。该系统基于MC4000相机和CMTracker软件。通过高速摄像机捕捉机翼表面上6个荧光特征点的时变位置信息,再由CMTracker软件导出位置变化数据,进而通过计算得到机翼的扭转运动、旋转运动和拍动运动曲线。
除了在无人机研究领域应用外,青瞳视觉(CHINGMU)光学动捕系统还可应用于四足机器人、人形机器人、灵巧手研究、软体机器人等研究,为科研工程、具身智能等研究提供精准的数据支持。