行业新闻
-
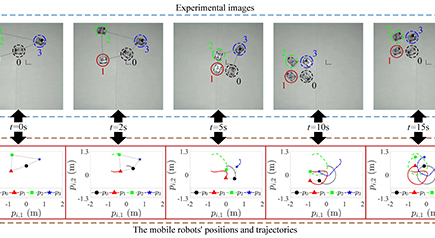
 18/March/20262026 Mar.18东南大学:受限二阶多智能体系统的分层一致性及其在多移动机器人编队中的应用近日,东南大学自动化学院王翔宇教授团队的研究论文“Hierarchical Consensus of Constrained Second-Order Multiagent Systems With Application to Formation of Multiple Mobile Robots”(受限二阶多智能体系统的
18/March/20262026 Mar.18东南大学:受限二阶多智能体系统的分层一致性及其在多移动机器人编队中的应用近日,东南大学自动化学院王翔宇教授团队的研究论文“Hierarchical Consensus of Constrained Second-Order Multiagent Systems With Application to Formation of Multiple Mobile Robots”(受限二阶多智能体系统的 -
 29/January/20262026 Jan.29CHINGMU | 动作失真、效率低下、预算超支!影视制作的痛点你中了几条?武戏拍摄现场,导演紧盯着监视器眉头紧锁——演员行云流水的招式,转化为CG画面后却成了僵硬的肢体摆动,兵刃交锋的细微震颤更是消失无踪;另一边,动画制作团队正陷入焦虑,技术人员耗费近半时间清理抖动的动捕数据
29/January/20262026 Jan.29CHINGMU | 动作失真、效率低下、预算超支!影视制作的痛点你中了几条?武戏拍摄现场,导演紧盯着监视器眉头紧锁——演员行云流水的招式,转化为CG画面后却成了僵硬的肢体摆动,兵刃交锋的细微震颤更是消失无踪;另一边,动画制作团队正陷入焦虑,技术人员耗费近半时间清理抖动的动捕数据 -
 22/December/20252025 Dec.22浙江大学:神经运动图对可控人体动画合成任务的可拓展助力12月15日至18日,第18届SIGGRAPH Asia在香港圆满落幕。作为全球图形学与互动技术领域的顶尖会议,本届大会汇聚了来自世界各地的优秀学者与技术团队,共同呈现并探讨领域前沿进展。青瞳视觉(CHINGMU)作为全球动作捕
22/December/20252025 Dec.22浙江大学:神经运动图对可控人体动画合成任务的可拓展助力12月15日至18日,第18届SIGGRAPH Asia在香港圆满落幕。作为全球图形学与互动技术领域的顶尖会议,本届大会汇聚了来自世界各地的优秀学者与技术团队,共同呈现并探讨领域前沿进展。青瞳视觉(CHINGMU)作为全球动作捕 -
 03/December/20252025 Dec.03CHINGMU | 东南大学:“机理+残差学习+实时干扰估计”的模型预测框架模型预测控制(MPC)模型预测控制(MPC)因其能够系统性的处理非线性、约束和最优性能,在机器人和自动化系统(例如,自动驾驶、工业过程)中受到广泛关注。然而,作为一种基于模型的控制方法,由模型不确定性和未知
03/December/20252025 Dec.03CHINGMU | 东南大学:“机理+残差学习+实时干扰估计”的模型预测框架模型预测控制(MPC)模型预测控制(MPC)因其能够系统性的处理非线性、约束和最优性能,在机器人和自动化系统(例如,自动驾驶、工业过程)中受到广泛关注。然而,作为一种基于模型的控制方法,由模型不确定性和未知 -
 17/November/20252025 Nov.17东南大学:基于单轨迹规划的速度受限多轮式移动机器人编队控制多轮式移动机器人编队控制在自主系统领域,多轮式移动机器人(Wheeled Mobile Robots, WMRs)的编队控制一直是研究热点,其在协同运输等实际任务中应用广泛。然而,现有的一些研究结果往往对WMRs速度约束考虑不充分,
17/November/20252025 Nov.17东南大学:基于单轨迹规划的速度受限多轮式移动机器人编队控制多轮式移动机器人编队控制在自主系统领域,多轮式移动机器人(Wheeled Mobile Robots, WMRs)的编队控制一直是研究热点,其在协同运输等实际任务中应用广泛。然而,现有的一些研究结果往往对WMRs速度约束考虑不充分, -
 17/November/20252025 Nov.17从“能动”到“鲜活”,动作捕捉如何赋予数字人“灵魂”?在数字人制作的道路上,你是否也曾遇到这样的难题?这些不仅是制作中的痛点,更是数字人能否从“能动”走向“鲜活”的关键。CHINGMU青瞳视觉基于《虚拟数字人全流程解决方案》,从硬件、软件到技术服务,为行业提供
17/November/20252025 Nov.17从“能动”到“鲜活”,动作捕捉如何赋予数字人“灵魂”?在数字人制作的道路上,你是否也曾遇到这样的难题?这些不仅是制作中的痛点,更是数字人能否从“能动”走向“鲜活”的关键。CHINGMU青瞳视觉基于《虚拟数字人全流程解决方案》,从硬件、软件到技术服务,为行业提供